گاهشمار هوش مصنوعی و روباتیک

1318
ربات الکترو
ربات الکترو، ساختهشده در شرکت وستینگهاوس، با فناوری رله کار میکرد و به دستورات صوتی تکراری، پاسخهای شوخوشنگی میداد که از قبل روی صفحات گرامافون 78 دور در دقیقهای ضبط شده بود. این ربات که در نمایشگاه جهانی به نمایش در آمد میتوانست سر و دستانش را حرکت دهد و حتی «سیگار دود کند».
1320
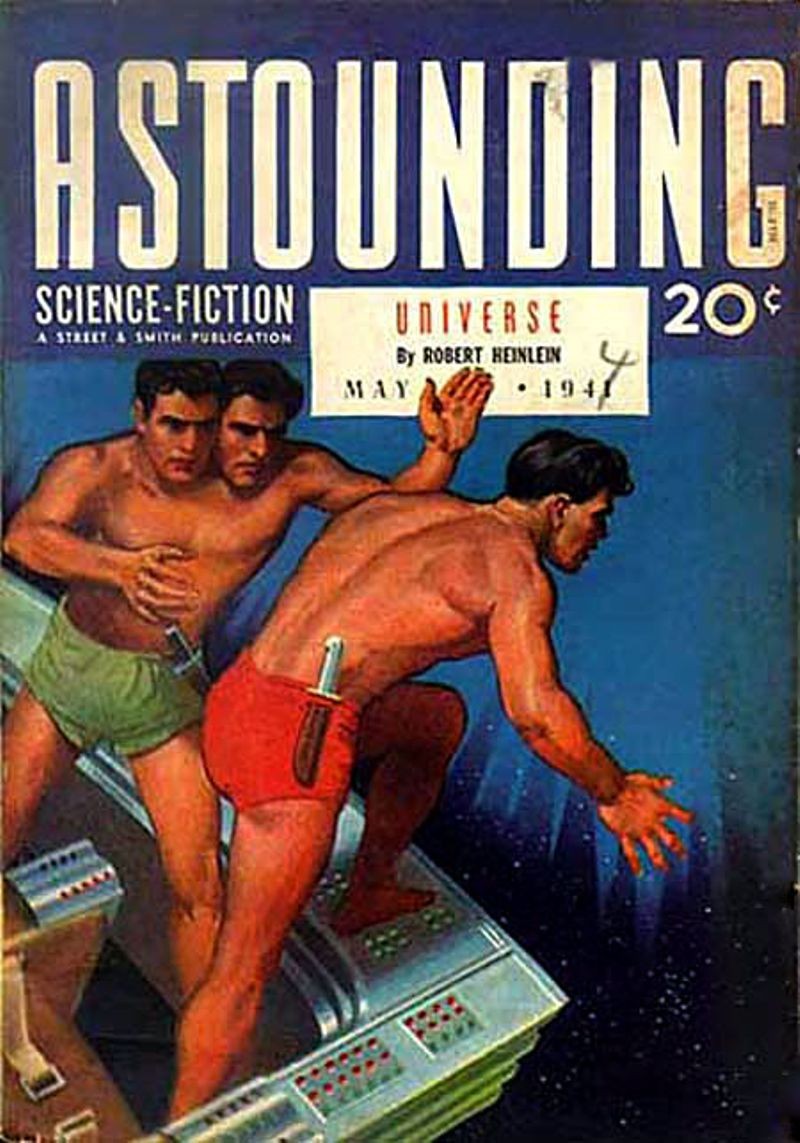
سه قانون رباتیک
ایزاک آسیموف داستان علمی-تخیلی دروغگو را در نسخهٔ ماه می مجلهٔ علمی-تخیلی آستاوندینگ منتشر کرد. در این داستان سه قانون رباتیک معرفی میشوند: - ربات نباید به یک انسان آسیب بزند یا با انجام ندادن کارهایی که انجامشان از او انتظار میرود، اجازه دهد یک انسان در معرض آسیب قرار گیرد. - ربات باید از دستورات پیروی کند، مگر در جایی که آن دستورات در تضاد با قانون اول قرار گیرد. - ربات باید تا جایی که دو قانون قبل نقض نشود، از خودش محافظت کند. گویا این نخستین باری است که از اصطلاح «رباتیک» استفاده شده است.
1322
انتشار مقالۀ یک حساب منطقی ایدهها که در فعالیتهای عصبی نهفته است
وارن مککالک و والتر پیتز مقالهٔ خلاقانهٔ یک حساب منطقی ایدهها که در فعالیتهای عصبی نهفته است را در گاهنامۀ بیوفیزیک ریاضیاتی منتشر کردند. این مقاله خیلی زود تبدیل به پژوهشی بنیادین در مطالعهٔ شبکههای عصبی شد و کاربردهای بسیاری در تحقیقات هوش مصنوعی پیدا کرد. در این مقاله، برای توضیح هوشمندی اعصاب، معماری سادهشدهای از شبکهٔ عصبی تشریح شده بود. با اینکه نورونهایی که نویسندگان توصیف کرده بودند، نسبت به نورونهای زیستی بسیار سادهتر بود، اما نسلهای بعدی محققان مدلی را که آنها پیشنهاد کرده بودند، تقویت کردند و بهبود بخشیدند.
1327
سایبرنتیک
نربرت واینر کتاب سایبرنتیکس را منتشر کرد. این کتاب تأثیر عمیقی بر تحقیقات هوش مصنوعی و سیستمهای کنترل داشت. واینر بر اساس آزمایشهایش در جنگ جهانی دوم سیستمهای ضدهواییای طراحی کرد که با تفسیر تصاویر راداری مسیر هواپیماهای دشمن را پیشبینی میکرد. واینر اصطلاح «سایبرنتیکس» را از یک کلمهٔ یونانی به معنای «راننده» ابداع کرد.

1328
نقل قول از آلن تورینگ در لندنتایمز دربارهٔ هوش مصنوعی
در 11 ژوئن لندن تایمز به نقل از آلن تورینگِ ریاضیدان نوشت: «هیچ دلیلی نمیبینم که یک ماشین نتواند وارد حیطههایی شود که به شکل معمول حیطهٔ فعالیت هوش انسانی است و سرانجام نتواند در شرایط برابر با آن رقابت کند. به گمان من حتی غزلسرایی را هم نمیشود مستثنی کرد، اگرچه این مقایسه تا حدی غیرمنصفانه است؛ زیرا یک ماشین بهتر از انسان میتواند ارزش غزلی را بفهمد که توسط یک ماشین دیگر سروده شده است».

1328
جراح مغز راجع به هوش مصنوعی اظهار نظر میکند
جراح مغز بریتانیایی جفری جفرسون، در 9 ژوئن در سخنرانی اهدای مدال لیستر در دانشگاه منچستر، گفت: «فقط زمانی میتوانیم بگوییم یک ماشین با مغز برابر است که آن ماشین بر اساس افکار و احساساتِ خودش، قطعهٔ سوناتی بنویسد یا کنسرتی بسازد، نه اینکه صرفا به شکل اللهبختکی نمادها را روی کاغذ بریزد. چنین ماشینی نهتنها قطعهٔ سونات را مینویسد، بلکه آگاه است که چنین چیزی را نوشته است. مکانیزمی که چنین ویژگیای نداشته باشد نه حس میکند (بلکه صرفاً یک سیگنال مصنوعی دریافت میکند که ابداعی پیشپاافتاده است)، نه از کامیابیاش محظوظ میشود، نه وقتی دریچههایش ذوب میشوند اندوهگین میشود، نه از تحسین دیگران به وجد میآید، نه بابت خطاهایش احساس بدبختی میکند، نه رابطۀ جنسی برایش گیرا ست، و نه وقتی به خواستهاش نرسد خشم و استیصال را حس میکند».

1329
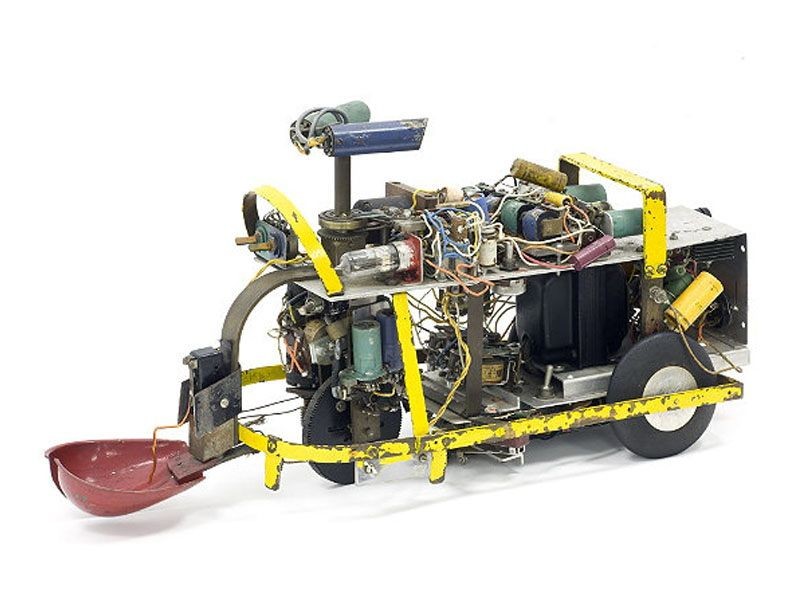
السی، رباتی ساختۀٔ گری والتر
عصبشناسی به نام گری والتر ماشینهای چرخداری ساخت که میتوانستند هدف خاصی را دنبال کنند. مشهورترین رباتش، السی، با استفاده از سلولهای فتوالکتریکی نورهایی با شدت متوسط را دنبال میکرد و از روشنایی شدید یا تاریکی اجتناب میکرد. این امر باعث شده بود بهطور خاص جذب جورابهای زنانه شود.
1329
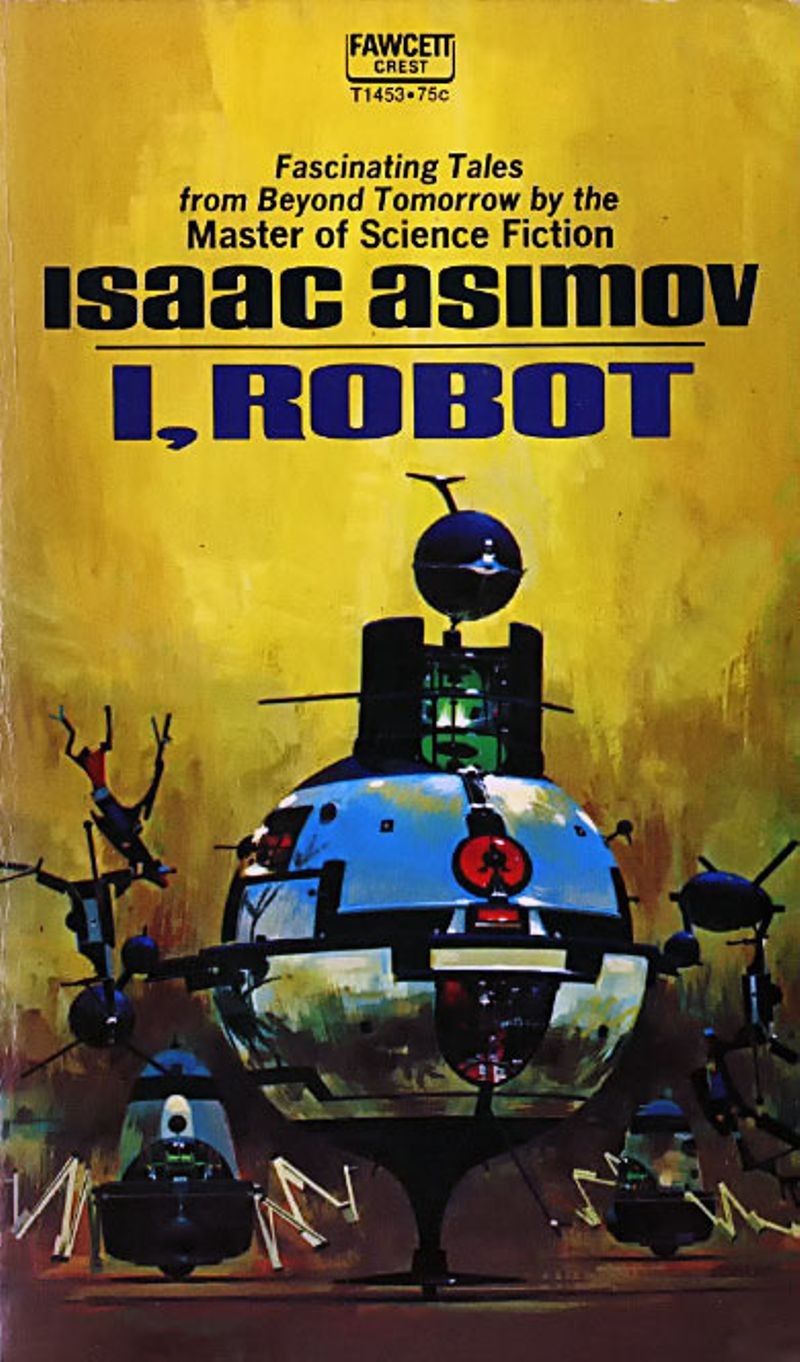
رمان من، ربات نوشتۀ ایزاک آسیموف
ایزاک آسیموف کتاب من، ربات را در این سال منتشر کرد. مخلوقات آسیموف برای اطمینان از اینکه تهدیدی برای انسانها و یکدیگر نیستند، باید از «سه قانون رباتیک» (1941) پیروی میکردند. کتاب شامل 9 داستان کوتاه علمی-تخیلی بود.
1330
اسکویی: ربات سنجاب
اسکویی: ربات سنجاب از دو حسگر نور و دو کلید تماسی برای شکار «آجیل» (در واقع توپهای تنیس) و کشیدنشان به لانهٔ خود استفاده میکرد. اسکویی «هفتادوپنج درصد قابل اعتماد» توصیف شد اما فقط در اتاق بسیار تاریک خوب کار میکرد. ایدهپردازی اسکویی توسط پیشگام حوزهٔ رایانه، ادموند برکلی، انجام شد که کتاب بسیار محبوب مغزهای غول پیکر یا ماشینهایی که فکر میکنند را نوشته بود. نمونهٔ اولیهٔ اسکویی در مجموعهٔ دائمی موزهٔ تاریخ رایانه وجود دارد.

1330
آزمون تورینگ
آلن تورینگ برای پاسخ به این پرسش که «آیا ماشینها میاندیشند» آزمایش استانداردی را ترتیب داد. او پیشنهاد کرد که اگر به هیچ وجه نتوانیم بین پاسخهای نوشتهشده توسط یک رایانه و پاسخهای نوشتهشده توسط یک انسان تمایز بگذاریم، باید آن رایانه را «متفکر» بدانیم.

1334
برنامۀ نظریهپرداز منطق
آلن نیول، هربرت سیمون و جی.سی شاو کار بر روی نظریهپرداز منطق را شروع کردند. نظریهپرداز منطق برنامهای بود که در نهایت 38 قضیه را از کتاب اصول ریاضی اثر راسل و وایتهد ثابت کرد. نظریهپرداز منطق چندین مفهوم مهم در هوش مصنوعی از جمله الگورتیمهای ابتکاری، روشهای فهرستپردازی و «استدلال بهمثابه جستجو» را معرفی کرد.

1335
رباتِ رابی
رابی در فیلم علمی-تخیلی شبکهٔ امجیام با نام سیارهٔ ممنوعه ظاهر شد. در این فیلم دکتر موبیوس رابی را بر اساس اطلاعات یافتشده از یک رایانهٔ متعلق به بیگانگان فضایی ساخته بود. رابی موظف بود در چهارچوب قوانین سهگانهٔ ایزاک آسیموف بهعنوان دستیار خدمهٔ انسانی عمل کند. این فیلم طرفداران زیادی پیدا کرد که این امر تاحدی بهعلت شخصیت شوخطبع رابی بود. اسباببازیهای رابی فروش بسیار زیادی داشتند.
1337
لیسپ
جان مککارتی زبان برنامهنویسی لیسپ را ابداع کرد. ویژگی مهم لیسپ این است که در آن دادهها و برنامهها بهسادگی در پرانتزهایی فهرست میشوند؛ این امر به یک برنامه امکان میدهد که با برنامههای دیگر (یا با خودش) همچون داده برخورد کند. این مشخصه باعث میشود بتوان با سهولت بیشتری اندیشهٔ انسان را در برنامهنویسی مدلسازی کرد. لیسپ همچنان در بسیاری از برنامههای کاربردی هوش مصنوعی استفاده میشود.

1338
ابزارهای برنامهنویسیشدهٔ خودکار
آزمایشگاه سروومکانیزیمهای امآیتی فناوری «ساخت به کمک رایانه» را به نمایش گذاشت. پروژهٔ ابزارهای برنامهنویسیشدهٔ خودکار منجر به خلق زبان APT شد که برای کنترل دستگاه فِرِزکاری استفاده میشد. در آن نمایشگاه یک ژنرال نیروی هوایی ادعا کرد این فناوری جدید ایالات متحده آمریکا را قادر خواهد ساخت «ماشینهای جنگیای بسازد که هیچکس حتی فکر حمله به آنها را به ذهنش راه ندهد». دستگاه فرزکاریِ نمایش دادهشده برای هر کدام از شرکتکنندگان نمایشگاه یک زیرسیگاری یادگاری ساخت.

1339
الگوریتم مرتبسازی سریع
همزمان با مطالعاتی که در مسکو بر روی ترجمۀ ماشینی انجام میشد، تونی هور الگورتیم مرتبسازی سریع را ارائه داد که تبدیل به رایجترین روش مرتبسازی در جهان شد. بعدها هور به شرکت بریتانیایی برادران الیوت رفت؛ جایی که کامپایلر تجاری Algol 60 را طراحی کرد. ملکه الیزابت دوم در سال 2000 به هور نشان شوالیه داد.
1340
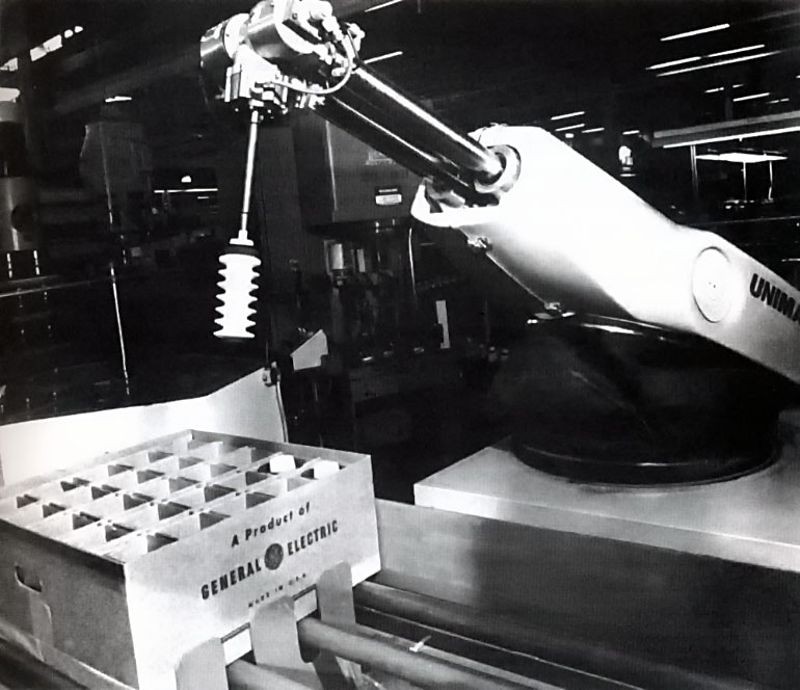
یونیمِیت
یونیمت نخستین ربات صنعتی بود که برای تولید انبوه استفاده شد و کارش را در جنرال موتورز شروع کرد. بازوی این رباتِ 4000 پوندی مرحله به مرحله دستوراتی را که روی طبلهٔ مغناطیسی ثبت شده بودند میخواند و قطعات داغ فلز ریختهگریشده را روی هم میچید. یونیمیت زادهٔ فکر جو انگلبرگر و جورج دِوُل بود و در اصل تولید لامپ تصویر تلویزیون را بهطور خودکار انجام میداد.

1342
بازوی رانچو
محققان بازوی رباتیک رانچو را در بیمارستان لوسآمیگوس در داونی کالیفرنیا برای افراد معلول طراحی کردند. مفاصل ششگانهٔ این ربات باعث میشد انعطافپذیریای مشابه بازوی انسان داشته باشد. این بازو پس از اینکه در 1963 به دانشگاه استنفورد منتقل شد، جایگاه مهمی در میان بازوهای مصنوعی رباتیک پیدا کرد که توسط رایانه کنترل میشدند.
1344
برنامهٔ هوش مصنوعی دِندرال
گروهی در استنفورد به رهبری ادوارد فاینباوم، جاشوا لدربرگ و کارل جراسی نخستین سامانهٔ خبره به نام دندرال را خلق کردند. دندرال یک برنامهٔ هوش مصنوعی بود که به منظور حل مسئله و استفاده از تخصص انباشتشدهٔ متخصصان ساخته شده بود. دندرال در حوزهٔ تخصصی شیمی و فیزیک کار میکرد. این برنامه با بهکاربردن مجموعهای از قوانین «اگر... آنگاه» ساختارهای مولکولی ترکیبات آلی را تشخیص میداد و در برخی موارد دقیقتر از متخصصان عمل میکرد.

1344
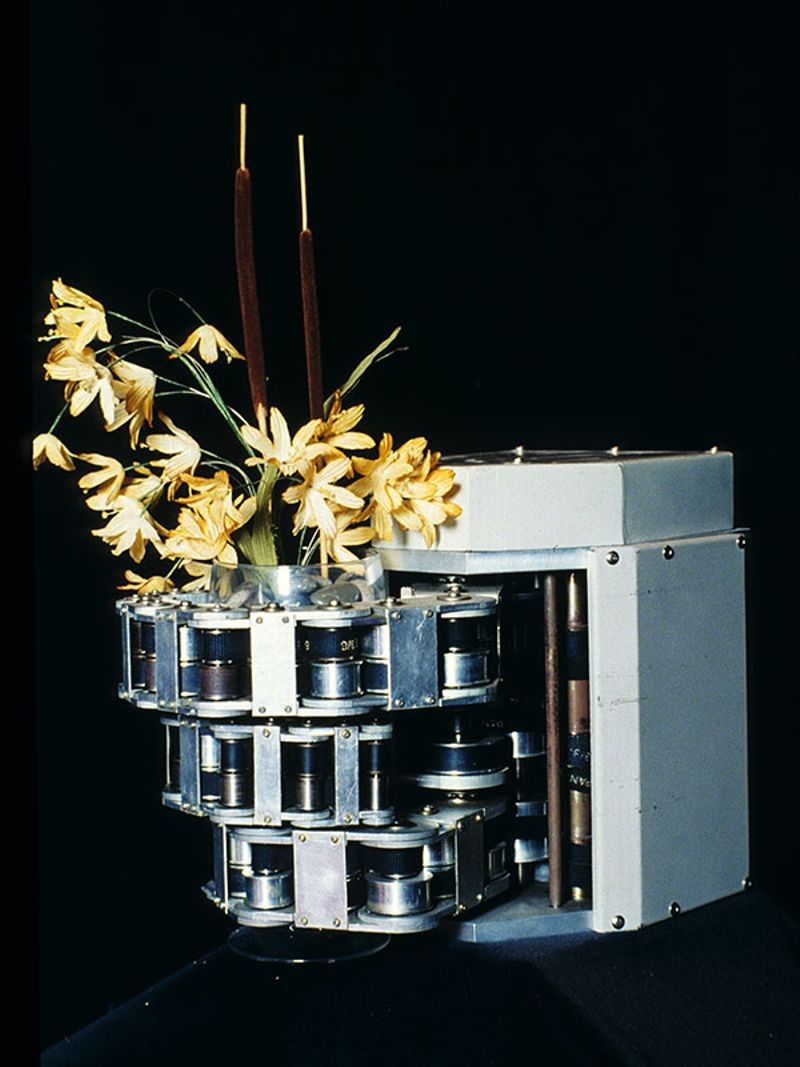
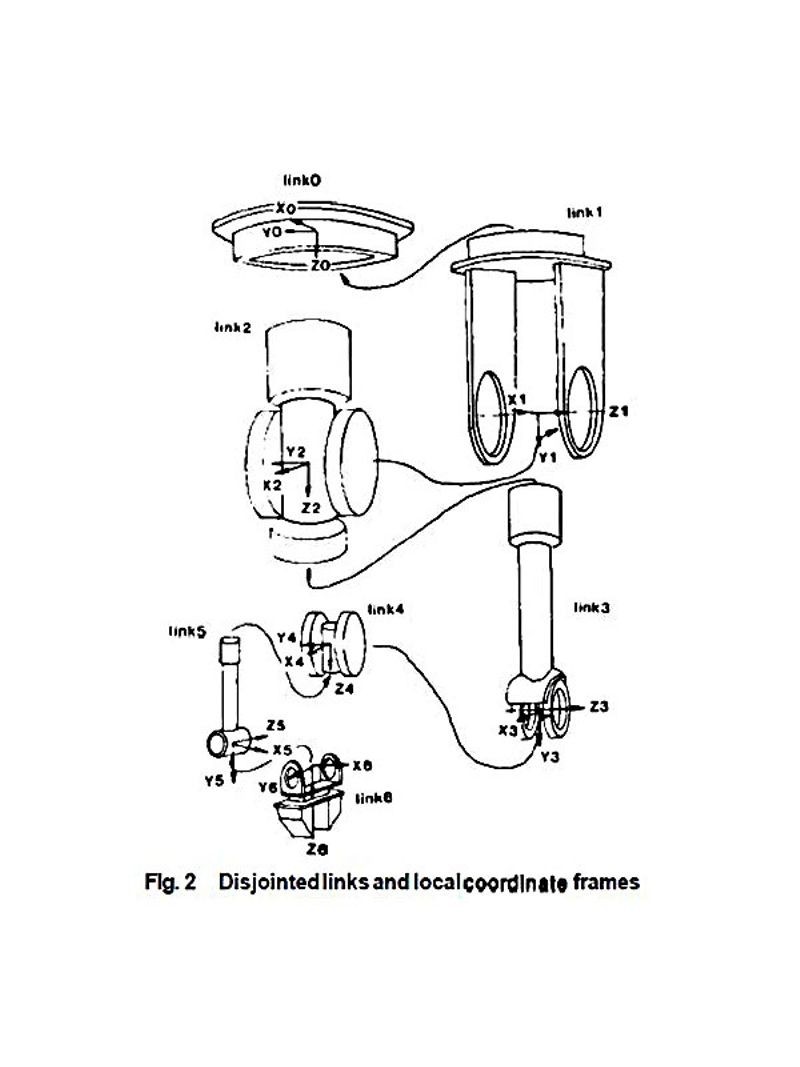
ربات اُرم
ربات اُرم (در زبان نروژی به معنی مار) که در استنفورد ساخته شد، یک بازوی غیرمعمول رباتیک بود که با نیروی هوای فشرده کار میکرد. حرکات ارم از طریق بادشدن یک یا چند بادکنک پلاستیکی ایجاد میشد. ارم در مجموع 28 بادکنک داشت که بین هفت صفحهٔ فلزی قرار گرفته بودند. این نوع طراحی خیلی زود منسوخ شد، زیرا با این فناوری حرکات ربات امکان تکرار سریع را نداشتند.
1345
الیزا، اختراع جوزف وایزنباوم
جوزف وایزنباوم پروژهٔ الیزا را به ثمر رساند. الیزا برنامۀ پردازش زبان طبیعی است. مشهورترین حالت آن به دکتر مشهور بود که مانند یک رواندرمانگر به سؤالات کاربران پاسخ میداد. دکتر تا زمانی که به سقف تواناییاش نرسیده بود و به مهملگفتن نیفتاده بود، قادر بود کاری کند کاربران به این باور برسند که در حال معاشرت با یک انسان دیگر هستند نه در حال گفتگو با یک برنامهٔ هوش مصنوعی. دکتر از عبارات یا سؤالات ازپیشتعیینشده استفاده میکرد و کلمات کلیدی را جایگزین میکرد تا رفتار انسانی را که واقعاً به سؤالات یا عبارات کاربران گوش میدهد تقلید کند.
1347
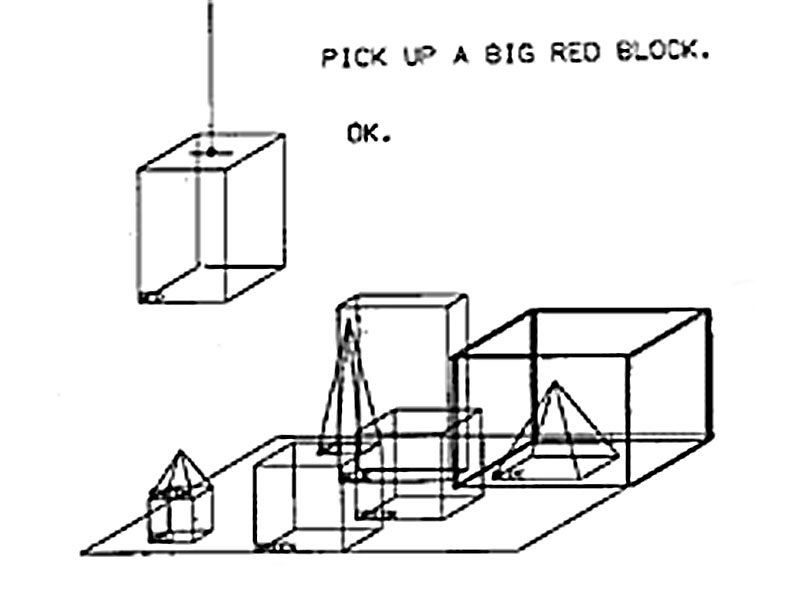
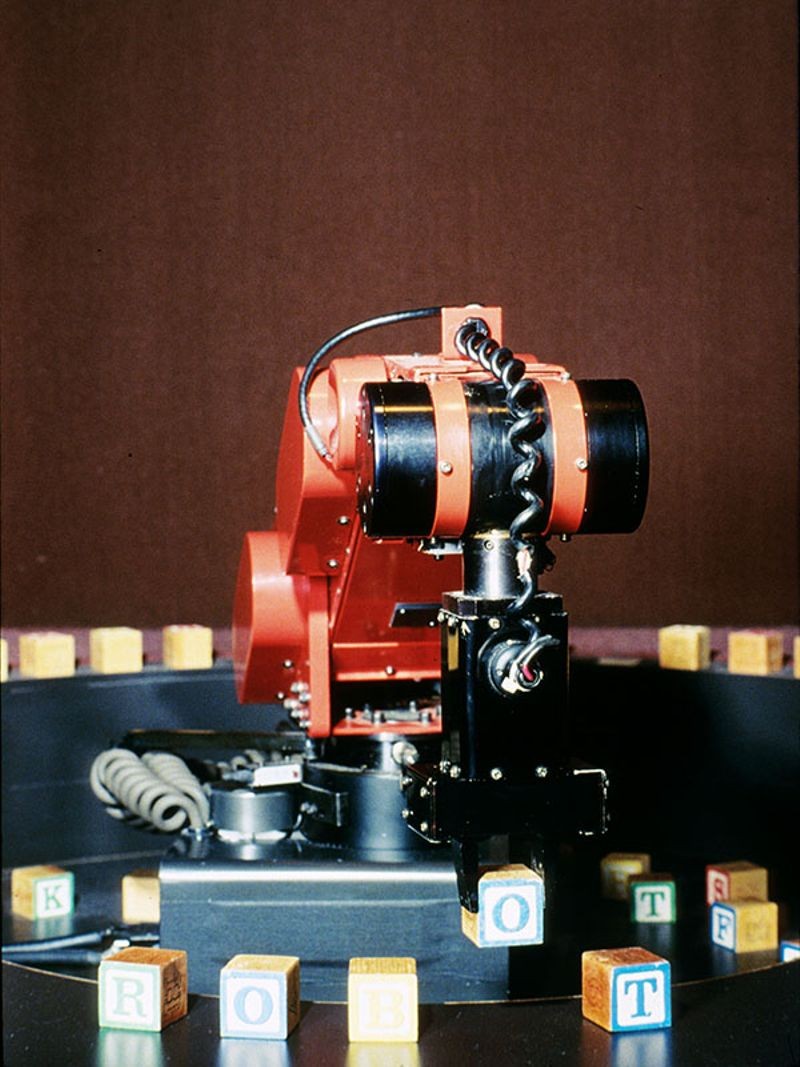
زبان طبیعی شردلو
در این سال تری وینوگراد کار بر روی پایاننامهٔ دکتری خود را در امآیتی آغاز کرد. پایاننامهٔ او بر شردلو، یک زبان طبیعی که در تحقیقات هوش مصنوعی استفاده میشود، متمرکز بود. در حالی که برنامههای پیشرو مانند الیزا قادر به درک واقعی دستورات انگلیسی و پاسخ مناسب به آنها نبودند، شردلو از طریق ترکیب قوانین نحوی، معنا کردن و استدلال قیاسی قادر بود این کار را انجام دهد. دنیای شردلو نیز بسیار ساده بود و دستوراتی که به او داده میشد شامل برداشتن و حرکت دادن بلوکها، مخروطها و اهرام با اشکال و رنگهای مختلف بود.
1347
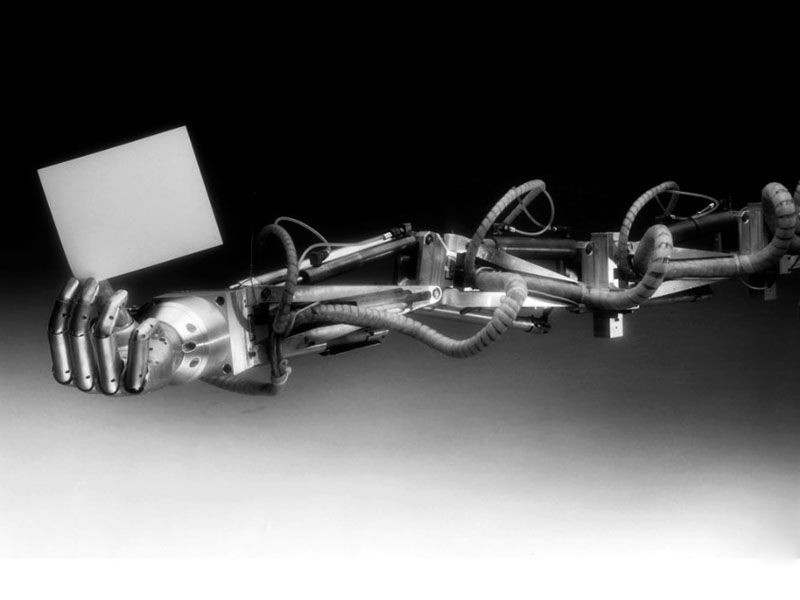
بازوی تِنتَکل
ماروین مینسکی ربات تنتکل را ساخت. این ربات مانند اختاپوس حرکت میکرد. دوازده مفصل داشت تا بتواند از طریق جریانهای هیدرولیکی داخل بازو، در اطراف موانع پیش رویش حرکت کند. یک دستگاه رایانهٔ DEC PDP-6 نیز آن را کنترل میکرد. تنتکل اگر روی دیوار نصب میشد، قادر بود وزن یک انسان را تحمل کند.
1348
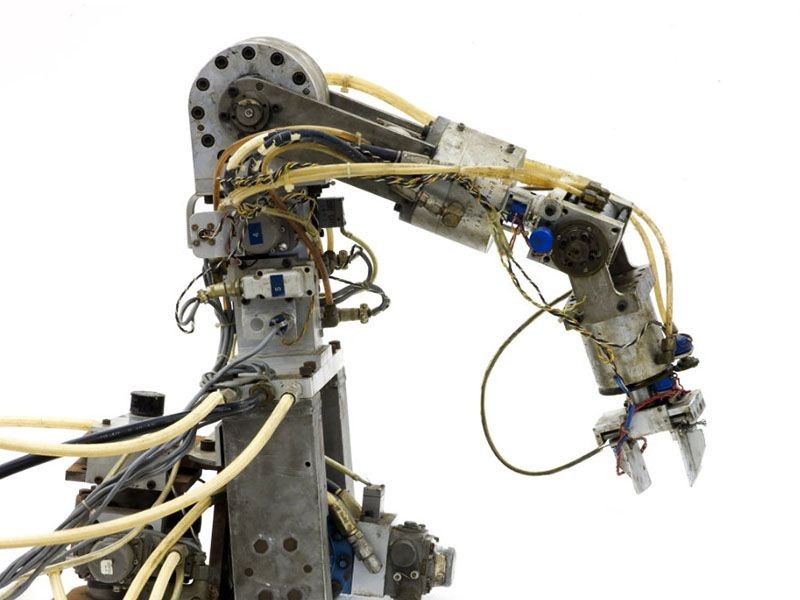
بازوی استنفورد ساختهشده توسط ویکتور شینمن
بازوی رباتیک استنفورد ساختهشده توسط ویکتور شینمن، پیشگام نخستین بازوهای رباتیکی بود که تواناش با الکتریسیته تأمین و با رایانه کنترل میشد. تا 1974 بازوی استنفورد توانست پمپ آب فورد مدل T را مونتاژ کند و خود را با حسگرهای نوری و تماسی هدایت کند. بازوی استنفورد مستقیماً به سوی تولید تجاری رفت. سپس شینمن سری رباتهای صنعتی پوما را برای شرکت یونیمیشن طراحی کرد، رباتهایی که برای مونتاژ خودرو و سایر کارهای صنعتی استفاده میشدند.

1349
ربات شِیکی
ربات شِیکی، ساخت شرکت اسآرآی اینترنشنال، نخستین ربات متحرکی بود که توسط هوش مصنوعی کنترل میشد. این ربات به دستگاههای حسگر مجهز بود و با استفاده از یک برنامهٔ حل مسئله به نام استریپس، و از طریق به کاربردن اطلاعاتی راجع به محیط اطراف در یک مسیر، قادر بود راه خود را میان سالنهای شرکت اسآرآی پیدا کند. شِیکی از یک دوربین تلویزیون، فاصلهیاب لیزری و حسگرهای ضربهگیر برای جمعآوری دادهها استفاده میکرد و سپس دادهها را به سیستم رایانهای DEC PDP-10 و PDP-15 ارسال میکرد. در مقابل، رایانه دستورات را از طریق یک پیوند رادیویی به شِیکی باز میفرستاد. شیکی میتوانست با سرعت 2 متر در ساعت حرکت کند.

1351
سیستم بازیابی اطلاعات زبان طبیعی لونار
لونار یک سیستم بازیابی اطلاعات زبان طبیعی است که توسط ویلیام وودز، رونال کاپلان و بانی نش وبر در شرکت بیبیان تکمیل شد. لونار به زمینشناسان کمک کرد به دادههای شیمیایی خاک و صخرههای ماه، که از طریق مأموریت آپولو 11 به دست آمده بود، دسترسی پیدا کنند و سپس آنها را مقایسه و ارزیابی کنند. وودز در طول دهۀ 1970 و تا اوایل دهۀ 1980 مدیر بخش هوش مصنوعی بیبیان بود.

1351
بازوی سیلور
دیوید سیلور در امآیتی بازوی سیلور را طراحی کرد. این بازوی رباتیک با توجه به بازخوردی که از تماسهای ظریف و حسگرهای فشاری میگرفت قادر بود اجزای کوچک را مونتاژ کند. حرکت دستگاه دقتی معادل انگشتان دست انسان داشت.
1355
ربات سافت گریپر ساختهٔ شیگئو هیروسه
این ربات میتوانست برای گرفتن اشیا به هر شکلی که باشند، خود را تطبیق دهد. طراحی هیروسه در مؤسسهٔ فناوری توکیو انجام شد. ساخت این ربات مدیون مطالعات هیروسه بر روی ساختارهای انعطافپذیر طبیعی نظیر خرطوم فیل و نخاع مار بود.

1356
رباتهای C3PO و R2D2 در فیلمهای جنگ ستارگان
C3PO و R2D2 نقشهای مهمی را در جنگ ستارگان، فیلم پرفروش سال 1977، بازی کردند. در طول فیلم C3PO که به آداب و رسوم و سنتها آگاهی داشت و بیش از 6 میلیون زبان را بلد بود، با شخصیتی سفیرمانند آمادۀ خدمتگزاری بود. ربات همراه C3PO یعنی R2D2 نیز به عنوان مکانیک و متخصص رابط رایانهای و کمک خلبان به قهرمان اصلی فیلم، لوک اسکایواکر، خدمت میکرد.
1357
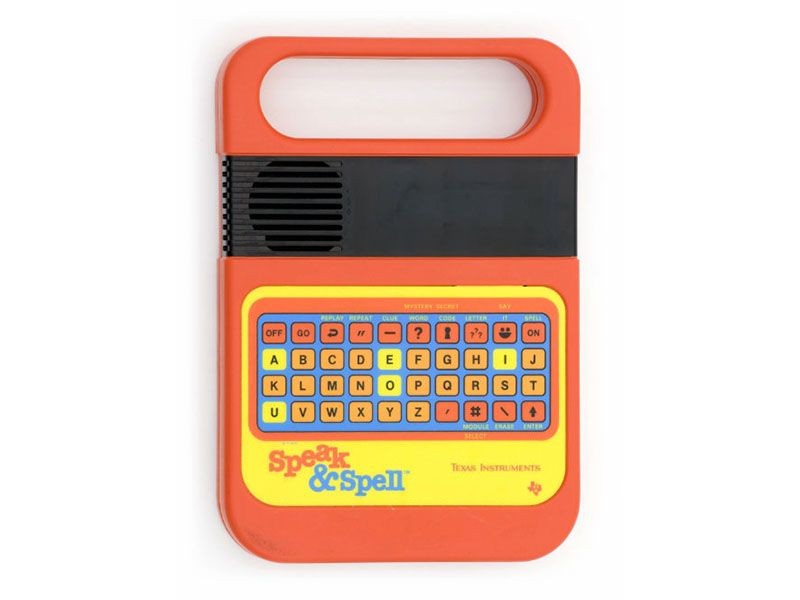
دستگاه بگو و هجی کن
شرکت تگزاس اینسترومنتس دستگاه بگو و هجی کن را معرفی کرد. این دستگاه یک ابزار یادگیری سخنگو برای کودکان ۷ سال به بالا بود و نخستین ابزار الکترونیکی بود که صدای انسان را از طریق آیسی نسخهبرداری میکرد. بگو و هجی کن از کدگذاری پیشبینیکنندهٔ خطی برای فرمولبندی یک مدل ریاضی از صدای انسان و پیشبینی نمونهٔ گفتاری بر اساس ورودیهای قبلی استفاده میکرد و اطلاعاتِ دیجیتالِ پردازششده را از طریق یک فیلتر به گفتار مصنوعی تبدیل میکرد. بگو و هجی کن میتوانست بیش از 100 ثانیه آواهای گفتاری را ذخیره کند.

1358
ربات گاری استنفورد
گاری استنفورد یک پروژهٔ تحقیقاتی بلندمدت بود که بین سالهای 1960 تا 1980 در دانشگاه استنفورد انجام شد. در سال 1979 یک صندلی را که به عنوان مانع در نظر گرفته شده بود دور زد و با موفقیت از آن عبور کرد. هانس موراوک در سال 1977 ربات گاری استنفورد را بازسازی و آن را به دید سهبعدی مجهز کرد. یک دوربین تلویزیونی که روی ریلی در بالای گاری نصب شده بود، از زوایای مختلف عکس میگرفت و آنها را به رایانه منتقل میکرد.
1360
بازوی رانۀ مستقیم
تاکئو کاناده نمونهٔ اولیهٔ چنین بازوهایی را ساخت. فناوری رانۀ مستقیم امروزه در صنعت استفاده میشود. موتورهای الکتریکی قرار گرفته در داخل مفاصل، نیاز به زنجیر یا تسمههایی را از بین میبرد که پیش از این در مکانیسمها به کار میرفت. بازوهای رانۀ مستقیم سریع و دقیقاند؛ زیرا اصطکاک و پسضربههای ناشی از فاصلهٔ بین اجزای مکانیسم را به حداقل میرسانند.

1361
ربات فرِد
نولان بوشنل با هدف ساخت رباتهای اسباببازی، شرکت اندروبات را با مهندسان سابق آتاری بنیانگذاری کرد. دستگاه آموزشی رباتیک دوستانه یا فرِد که برای گروه سنی 6 تا 15 سال طراحی شده بود، هرگز وارد بازار نشد.
1361
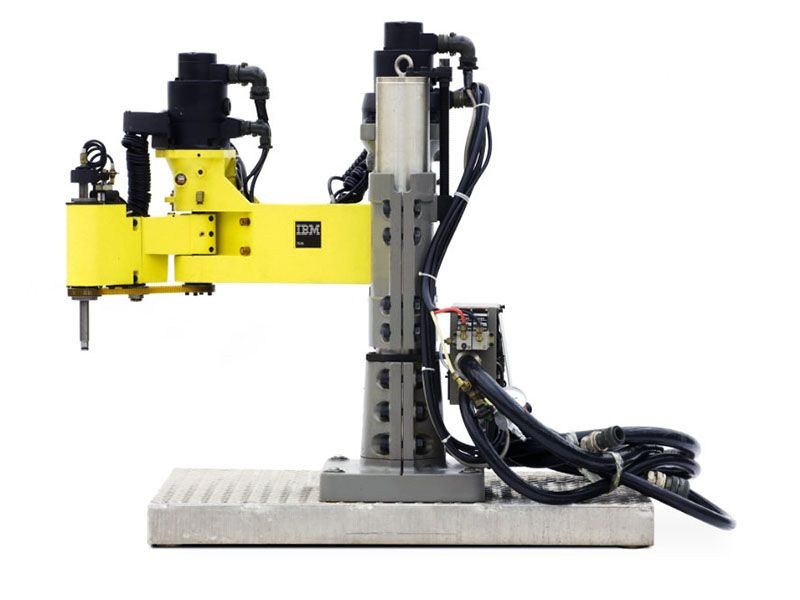
ربات 7535 ساخت آيبیام
ربات 7535 بر اساس یک ربات ژاپنی در آيبیام ساخته شد. این ربات با رایانههای شخصی این شرکت هدایت میشد و با اِیامال (یک زبان ویژۀ تولید) شرکت آيبیام برنامهریزی شده بود. 7535 میتوانست اجسامی با وزن حداکثر 13 پوند را حرکت دهد.

1363
کیت ربات هیرو جونیور
شرکت هیثکیت، کیت ربات خانگی هیرو جونیور را معرفی کرد. این ربات یکی از چندین رباتی بود که شرکت در آن زمان میفروخت. هیرو جونیور میتوانست با استفاده از سونار (دستگاه ردیاب صوتی) در راهروها پرسه زند، بازی کند، آهنگ بخواند، حتی مانند یک ساعت زنگدار عمل کند. در کتابچهٔ راهنمای دستگاه ادعا شده بود که این ربات با گوشدادن به صدای انسانها «میخواهد همدم صمیمی انسان باقی بماند».

1364
ربات سِنتری ساخت شرکت دنینگ
شرکت دنینگ واقع در بوستون ربات سِنتری را به عنوان نگهبان امنیتی طراحی کرد. این ربات میتوانست تا 14 ساعت با سرعت سه مایل در ساعت به گشتزنی بپردازد و راجع به هر چیز غیرمعمول در شعاع 150 فوتی هشدار رادیویی صادر کند. این محصول و شرکت سازندهاش نتوانستند موفق باشند.

1364
اُمنیبات 2000
امنیبات 2000 ربات اسباببازی کنترل از راه دور بود که میتوانست حرکت کند، صحبت کند و اشیا را حمل کند. در نوار کاستی که در سینهاش کار گذاشته شده بود اعمالی که باید انجام میداد و حرفهایی که باید میگفت ضبط شده بود

1365
الامآی لامدا
رایانهٔ پیشرفته الامآی لامدا مخصوص زبان لیسپ ساخته شد. لیسپ، که یک زبان ترجیحی برای هوش مصنوعی بود، بر روی رایانههای متداول گرانقیمت بهکندی اجرا میشد. این رایانهٔ تخصصی لیسپ، که هم سریعتر بود و هم ارزانتر، بر اساس ماشین کیدر -که ریچارد گرینبلات و توماس نایت در امآیتی طراحیاش کرده بودند - ساخته شده بود.
1366
گیرندۀ متحرک RM-501 ساخت میتسوبیشی
میتسوبیشی گیرندۀ متحرک RM-501 را ساخت. این ربات که یک گیره و بازو داشت، در واقع یک ربات صنعتی کوچک و تجاری بود و برای کارهایی مانند مونتاژ محصولات یا جابهجایی مواد شیمیایی استفاده میشد. بازو و گیره روی هم شش درجۀ آزادی داشتند و توسط موتورهای الکتریکی متصل به مفاصل توسط تسمه به حرکت در میآمدند. ربات میتوانست به سرعت 15 اینچ در ثانیه حرکت کند و ۲٬۷ پوند وزنه بلند کند. دقت این ربات معادل ۰٬۰۲ اینچ بود.

1368
رایانه استاد شطرنج را شکست داد
دیوید لوی اولین استاد شطرنجی بود که از رایانه شکست خورد. برنامهٔ تفکر عمیق لوی را شکست داد. لوی پیش از این تمام حریفهای رایانهای را از سال 1968 شکست داده بود.
1371
پروژهٔ نسل پنجم سامانههای رایانهای در ژاپن متوقف شد
پس از تخصیص میلیونها دلار به برنامهٔ تحقیق و توسعه، وزارت تجارت و صنعت بین الملل ژاپن، پروژهٔ نسل پنجم سامانههای رایانهای ژاپن را متوقف کرد. هدف از این پروژه ساخت پلتفرمی بود که سیستمهای هوش مصنوعی بتوانند از طریق آن رشد کنند و در نهایت ماشینهایی بسازند که دارای قابلیتهای استدلالی باشند و نه اینکه صرفاً محاسبات را انجام دهند. اعلام پروژهٔ نسل پنجم در ژاپن تا حدودی باعث واکنش صنعت رایانهٔ آمریکا شد و گروهی از شرکتها با هم شرکت فناوری رایانه و میکروالکترونیک را تشکیل دادند.

1374
پهپاد شکاری MQ-1 به خدمت فراخوانده شد
پهپاد شکاری MQ-1 توسط نیروی هوایی ارتش ایالات متحده آمریکا و سیا ساخته و به خدمت گرفته شد. MQ-1 پس از 11 سپتامبر در جنگ افغانستان و مناطق طایفهنشین پاکستان برای نبرد با نیروهای القاعده و طالبان به شکل گسترده استفاده شد. این پهپادهای بیسرنشین مجهز به دوربینهای شناسایی بودند و میتوانستند برای حمل دو موشک ارتقا یابند.
1376
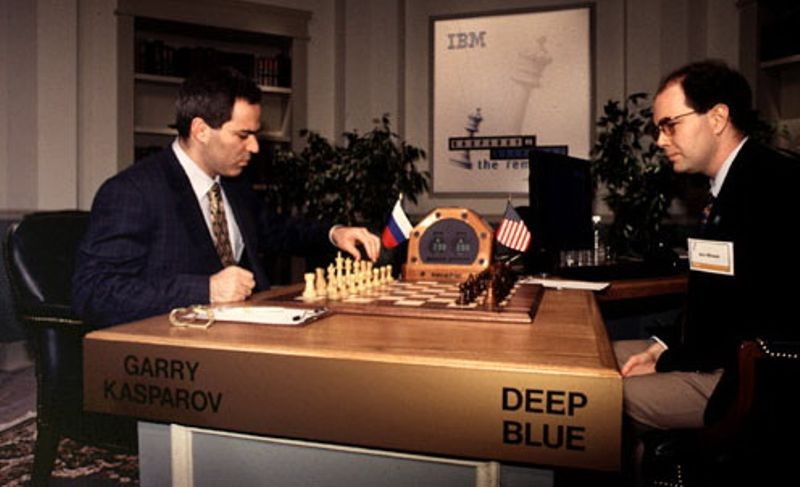
دیپبلو گری کاسپاروف را شکست داد
رایانه دیپبلو ساخت شرکت آيبیام با توانایی ارزیابی 200 میلیون وضعیت مهره در ثانیه، توانست گری کاسپاروف، قهرمان شطرنج زمان خود را شکست دهد. رایانه دیپبلو از 6 مسابقهٔ انجامشده دو بار برد، یکبار باخت و سهبار بازی را با کسب تساوی به پایان برد. بازیها طی چند روز در یک استودیوی تلویزیونی با 600 تماشاگر برگزار شد که در طبقهٔ پایین بازی را بر روی صفحهٔ نمایش تماشا می کردند. این رقابت به عنوان مسابقهٔ برگشت در نظر گرفته شد؛ زیرا کاسپاروف نسخهٔ قبلی دیپبلو را در سال 1996 شکست داده بود.

1377
فُربی در حراج تعطیلات به موفقیت دست یافت
فُربی در حراج تعطیلات 1998 با قیمت 300 دلاری خود به فروش بالایی رسید. فُربی در ابتدا فقط میتوانست به زبان ساختگی «فُربیش» حرف بزند ولی به تدریج دستورات انگلیسی را یاد میگرفت. این ربات قادر بود از طریق یک درگاه مادون قرمز که بین چشمهایش قرار داشت با فربیهای دیگر ارتباط برقرار کند.

1378
سگ رباتیک آیبو
آیبو توسط سونی ساخته شد و دوهزار دلار قیمت داشت. آیبو یک سگ خانگی رباتیک بود و به گونهای طراحی شده بود که از طریق تعامل با محیط اطراف، صاحبش و سایر آیبوها قادر به «آموختن» باشد. این ربات به بیش از 100 دستور صوتی مختلف واکنش نشان میداد و میتوانست با استفاده از تغییر لحنِ اصواتی که ادا میکرد، ارتباط برقرار کند. آیبو حتی به گونهای برنامهریزی شده بود که مانند همتایان بیولوژیکش، برخی از دستوراتی که میشنید را نادیده بگیرد.

1379
آسیمو ربات انساننمای ساخت شرکت هوندا
هوندا ربات انساننمای آسیمو را معرفی کرد. این ربات میتوانست با سرعت یک مایل در ساعت قدم بزند، از پلهها بالا برود و بعد از تشخیص خطر مسیرش را تغییر دهد. با استفاده از دوربینی که روی سرش نصب شده بود، قادر بود چهرهها و همچنین حالت و حرکت چند شئ را بهطور همزمان تشخیص دهد. بهعلاوه آسیمو میکروفونهایی داشت که به کمک آنها به دستورات صوتی واکنش نشان میداد. تقریباً 100 دستگاه از این ربات ساخته شد.

1381
پروژهٔ سِنتیباتس
پروژهٔ سِنتیباتس که توسط آژانس پروژههای تحقیقاتی پیشرفتهٔ دفاعی (دارپا) تأمین مالی میشد، در پی اثبات این بود که تا 100 ربات میتوانند یک منطقهٔ بالقوه خطرناک را بررسی کنند، بیدرنگ نقشهای بسازند و موارد مشخصی را جستجو کنند. سنتیباتها برای هماهنگکردن فعالیتهایشان با یکدیگر ارتباط برقرار میکردند. اگر یک ربات از کار میافتاد، دیگری وظیفهٔ آن را بر عهده میگرفت. رباتها کاملاً خودران بودند و نیازی به نظارت انسانی نداشتند.

1381
رومبا معرفی شد
شرکت آیربات رومبا را معرفی کرد. این جاروبرقی رباتیک خودران با استفاده از یک الگوریتم نظافتی میتوانست در عین اینکه موانع را تشخیص میدهد و از آنها دوری میکند، یک اتاق را بهطور کامل تمیز کند. رادنی بروکس، بنیانگذار آیربات، پیشتر تحقیقاتی را در آزمایشگاه رباتیک انجام داده بود. او در تحقیقاتش به جای استفاده از یک «مغز» مرکزی، بر رفتارِ واکنشیِ حشرهمانند برای ایجاد یک رفتار هدفمند متمرکز بود.

1382
آزمایشگاه علوم رایانه و هوش مصنوعی در امآیتی تشکیل شد
آزمایشگاه علوم رایانه و هوش مصنوعی در امآیتی از ادغام آزمایشگاه علوم رایانه و آزمایشگاه هوش مصنوعی شکل گرفت. آزمایشگاه هوش مصنوعی در 1959 توسط جان مککارتی و ماروین مینسکی بنیانگذاری شده بود و آزمایشگاه علوم رایانه در 1963 با پروژهٔ مک آغاز به کار کرده بود.
1383
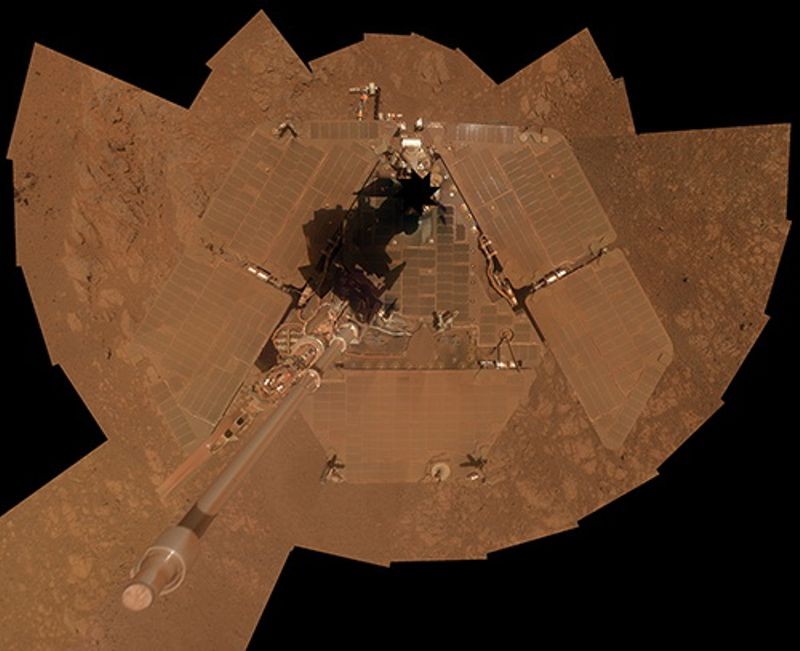
مریخنوردهای آپورچنیتی و اسپیریت بر روی مریخ فرود آمدند
مؤسسهٔ فناوری کالیفرنیا هر دو ربات آپورچنیتی (فرصت) و اسپیریت (روح) را طراحی کرد. این رباتها در سال 2004 در سطح مریخ فرود آمدند و 20 برابر بیشتر از عمر برنامهریزیشدهٔ 90 روزهٔ خود به فعالیت ادامه دادند. در حالیکه اسپیریت در 2009 از حرکت باز ایستاد و ارتباط با این ربات در 2010 به کلی از بین رفت، آپورچنیتی بسیار بیش از زمانی که از او انتظار میرفت کار کرد؛ این ربات تا 2018 فعال بود.

1384
اتومبیل خودران استنفورد جایزهٔ «چالش بزرگ» را برد
اتومبیل خودران استنلی متعلق به تیم مسابقهٔ استنفورد برندهٔ مسابقهٔ چالش بزرگ شد. این مسابقه در نزدیکی لاسوگاس توسط دارپا برگزار میشد. اتومبیل تیم استنفورد یک فلوکسواگن توارگ بود که بهطور کاملاً خودران و بدون هرگونه مداخلهٔ انسانی، مسیر صعبالعبور بیابانی به طول 175 مایل را در مدت کمتر از 7 ساعت به پایان برد، در حالی که سقف زمانی تعیینشده 10 ساعت بود. این تیم 2 میلیون دلار بابت این پیروزی جایزه گرفت. چالشهای دارپا نخستین بار در سال 2004 معرفی شد تا علایق و خلاقیت بیشتری را در حوزهٔ ماشینهای خودران جذب کند.

1385
پنجاهمین سالگرد همایش سالیانۀ هوش مصنوعی
جشن پنجاه سالگی پروژۀ تحقیقاتی تابستانۀ دارتموث در محوطۀ کالج دارتموث برگزار شد. پنج نفر از کسانی که در همایش اول سال 1956 حضور داشتند، در این جشن شرکت کردند؛ جان مک کارتی، ماروین مینسکی، ترنچارد مور، اولیور سلفریج و ری سولومونوف. اصطلاح «هوش مصنوعی» اولین بار در طرح پیشنهادی اولین همایش مطرح شد؛ این همایش اول را یکی از رویدادهای مهم در تاریخ هوش مصنوعی می دانند.
1386
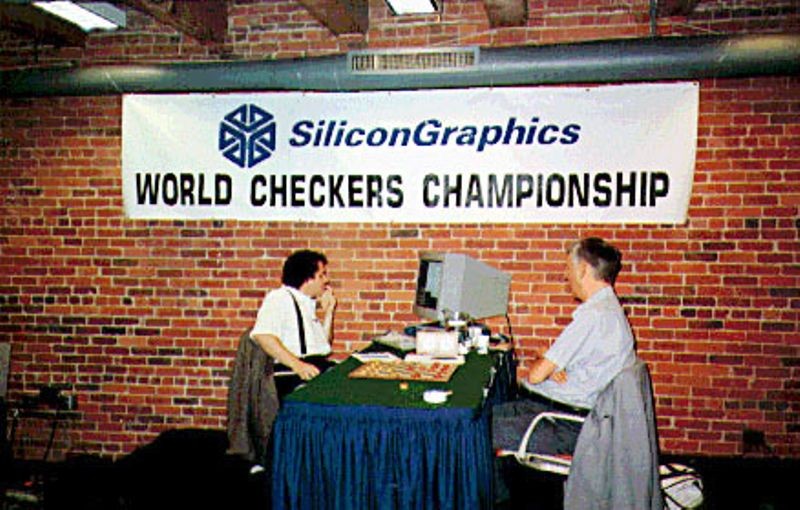
انتشار مقالۀ چکرز حل میشود
مقالهای با عنوان چکرز حل میشود در نسخهٔ سپتامبر مجلهٔ ساینس منتشر شد. در این مقاله نوشته شده بود «بازی بینقص از سوی هر دو طرف منجر به تساوی میشود». رهبری گروهی که تحقیق را انجام داده بود با پروفسور جاناتان شیفر از دانشگاه آلبرتا بود که خود از سال 1989 بر روی مسئلهٔ چکرز کار میکرد. در خلال کار بر روی مسئله، گروه تحقیقاتی برنامهای با نام چینوک ساخت که چندین مسابقه در برابر انسان را با موفقیت پشت سر گذاشت. از جمله مسابقهای که در موزهٔ رایانهٔ بوستون در 1994 برگزار شد.

1389
واتسون ساختهشده توسط آيبیام شرکتکنندگان در مسابقهٔ تلویزیونی جئوپاردی! را شکست داد
در سال 2010 واتسون ساختهشده توسط شرکت آيبیام، در مقابل شرکتکنندگان پیشین مسابقه جئوپاردی! رقابت کرد و با کسب 71 درصد پیروزی، برندهٔ مسابقه شد. این در واقع آمادهسازی برای مسابقات 2011 بود که در آنجا واتسون توانست دو نفر از قهرمانان سابق این مسابقه را شکست دهد. در نمایش تلویزیونی، واتسون با تجزیه و تحلیل دقیقتر و سریعتر پرسشها و موضوعات مطرحشده از طریق زبان طبیعی، بهراحتی توانست دو تن از بهترین شرکتکنندگان در این مسابقه، کن جنینگز و برد راتر را شکست دهد.
1390
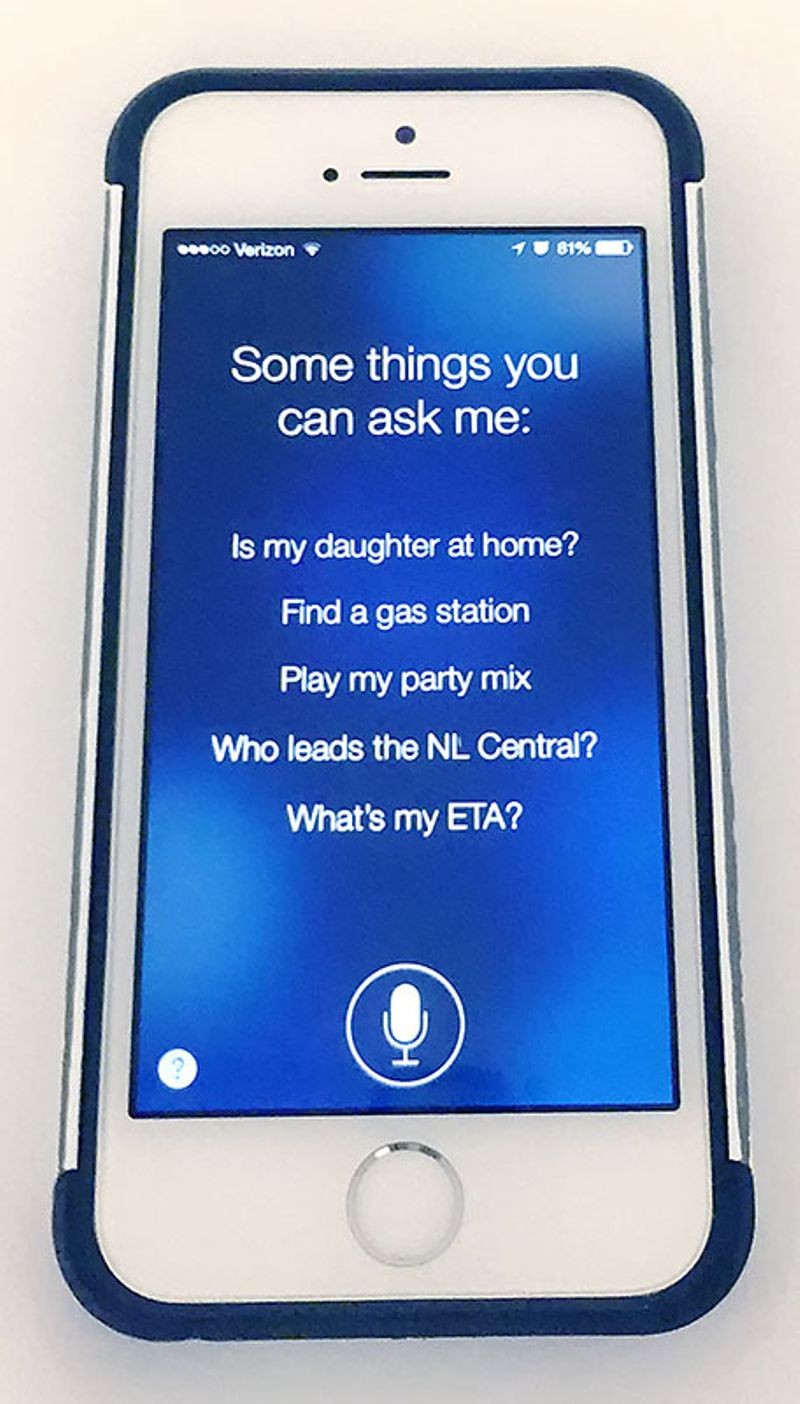
از سیری رونمایی شد
سیری – از قابلیتهای داخلی گوشی هوشمند اپل آیفون S4 - در ماه اکتبر معرفی شد. سیری یک دستیار شخصی است که با صدا فعال میشود، میتواند درخواستهای زبان طبیعی را «درک» کند و اطلاعات بهدستآمده از وب را با یادگیری تمایلات و ترجیحات کاربر تنظیم کند. سیری میتواند عملکردهای زیادی را انجام دهد - از جمله توصیهٔ رستورانهای محلی (با استفاده از وب و سیستم جیپیاس داخلی آیفون)، ارائهٔ مسیرهای پیادهروی یا رانندگی، ارائهٔ پیشبینی آبوهوا، نشاندادن نتایج مسابقات ورزشی اخیر و حتی پاسخدادن به سؤالات بهظاهر بیمعنی. اگرچه «صدای» برنامه بهطور پیشفرض زنانه است، اما میتوان آن را به صدای مرد تغییر داد.

1391
بیل گیتس نیز در مورد هراس از آیندهٔ هوش مصنوعی به هاوکینگ و ماسک پیوست
بیل گیتس، یکی از بنیانگذاران مایکروسافت، به جمعی از پیشگامان برجستهٔ فناوری و دانشمندان پیوست و افکار خود را در مورد اثرات خطرناک بالقوه و پیامدهای ناخواستهٔ هوش مصنوعی بر تمدن بشری بیان کرد. پیش از این ایلان ماسک، استیون هاوکینگ و برخی دیگر، احساسات مشابهی را ابراز کرده بودند. در طرف مقابل، افرادی بودند که احساس میکردند هوش مصنوعی ما را با کمک «ذهن» برادران مصنوعی انسان، به سوی دورانی از دستاوردهای بیسابقهٔ بشری رهنمون خواهد کرد. در حالی که گیتس و دیگران در عین حال که احساس میکردند ماشینهای هوشمند در کوتاهمدت برای بشر مفید خواهند بود، آیندهای را پیشبینی کردند که در آن ماشینهای فوقهوشمند پیشرفتهتر میتوانند تهدیدی جدی برای انسان باشند.