

ربات شِیکی


ربات شِیکی
شیکی ربات متحرکی بود که به دوربینها و حسگرهای لمسی مجهز شده بود و از راه دور با رایانهای بزرگ هدایت میشد. فناوری این ماشین بر پیشرفت بینایی رایانه، پردازش زبان، طراحی برای درک دستورات (نظیر: «بلوک را از روی سکو هل بده!») و مدیریت اعمال استوار بود.
ربات شیکی
رباتها برای درک ورودی حسگرها، ساختن نقشه و عملکردن نیازمند هوش هستند. به همین دلیل رباتها برای آزمون بسیاری از مفاهیم هوش مصنوعی ابزارهای بسیار مناسبیاند. ساخت ربات شِیکی در مؤسسهٔ تحقیقات استنفورد (SRI) از سال 1966 تا سال 1972 به طول انجامید. شیکی نخستین ربات متحرکی بود که اعمالش مبتنی بر استدلال بودند. زمین بازی شیکی مجموعهای از اتاقها با بلوک و رمپ بود. اگرچه شیکی ابزاری کاربردی نبود، اما منجر به پیشرفت در روشهای هوش مصنوعی، از جمله تجزیه و تحلیل بصری، مسیریابی و اثرگذاری بر اشیا شد.
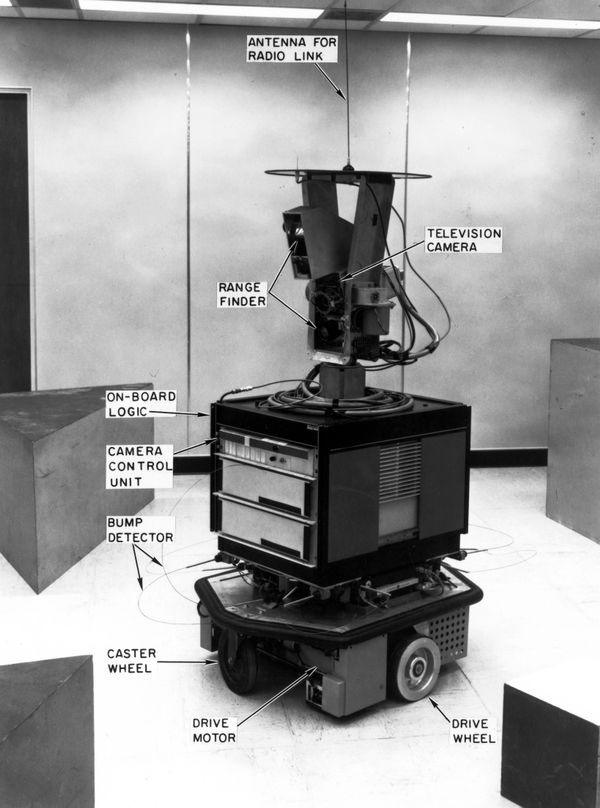
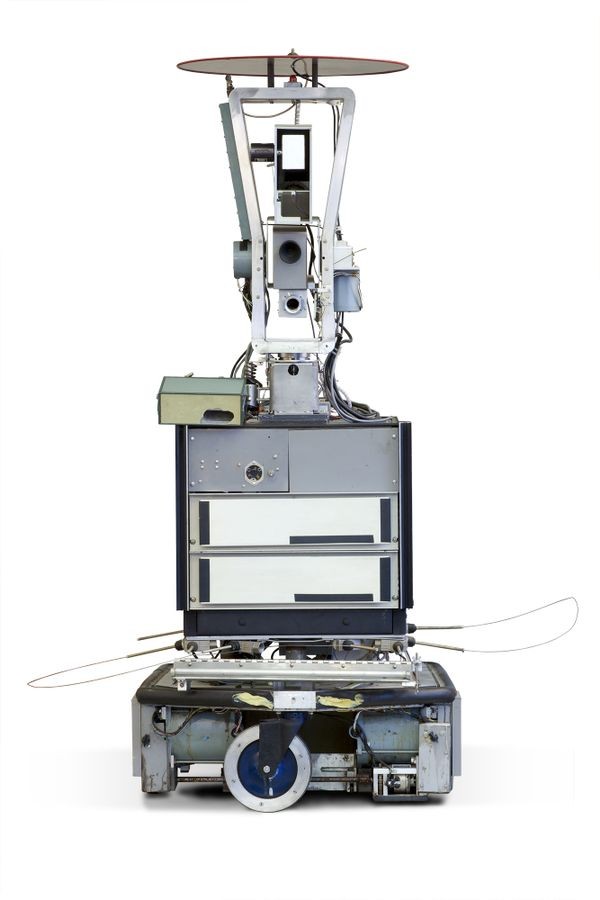
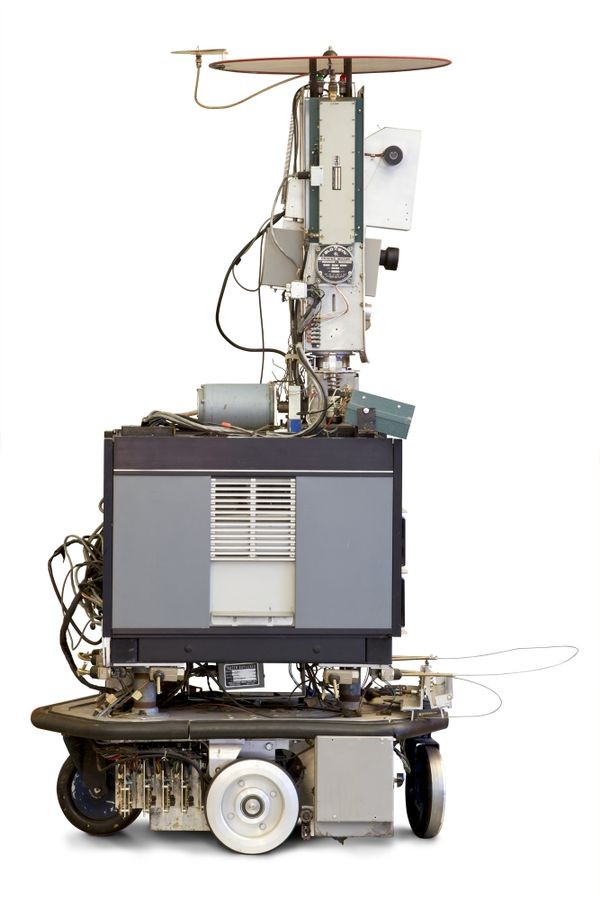
اجزای شیکی
شیکی از ارتباط رادیویی دوطرفه برای برقراری ارتباط با رایانههای بزرگی که آن را کنترل میکردند، استفاده میکرد.

سون والستروم و نیلز نیلسون در کنار شیکی
نیلز نیلسون، پیشگام هوش مصنوعی، 23 سال را در موسسۀ تحقیقات استنفورد گذراند و در پژوهش، برنامهریزی، بازنمایی دانش و رباتیک مشارکت داشت.
شیکی چگونه راه خود را پیدا میکرد؟
شیکی از روشهای جستجوی مختلف برای یافتن «راهنشان» (waypoint) و پیمایش آن و در عین حال اجتناب از موانع استفاده میکرد. اگرچه مسائلی که شیکی با آنها روبهرو بود، ساده بودند و حلشان فقط نیاز به توانایی مقدماتی در جستجو داشت، اما محققان یک الگوریتم جستجوی نرمافزاری پیچیده به نام A* را توسعه دادند که برای محیطهای پیچیدهتر نیز کار میکرد. امروزه A* در کاربردهایی مانند درک متن نوشتهشده، تعیین مسیرهای رانندگی و بازیهای رایانهای استفاده میشود. یک سیستم برنامهریزی به نام استریپس (STRIPS; Stanford Research Institute Problem Solver) برای رسیدن به اهداف پیچیدهای مانند «به اتاق D برو و بلوک 9 را به سمت درگاه 4 فشار بده» دست به استدلال عقلانی میزد.
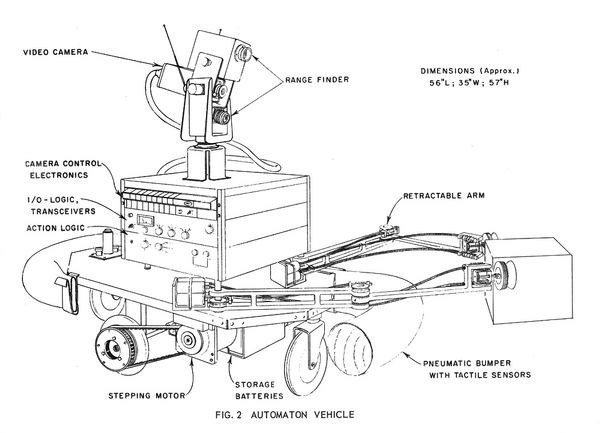
طرح اولیۀ ربات شیکی
چارلز روزن که پژوهشگری در حوزهٔ شبکه عصبی و فیزیک بود در سال 1963 ساخت ماشین متحرک خودران را پیشنهاد داد. بازوهای جمعشوندهٔ (retractable arms) نشاندادهشده در این طرح هرگز ساخته نشد.
طرح پیشنهادی اولیه برای ساخت ربات شیکی
مانند بسیاری دیگر از پیشرفتهای حاصلشده در فناوری و علوم رایانه، شیکی نیز توسط وزارت دفاع ایالات متحده آمریکا تأمین مالی شد و هدف آن توسعهٔ فناوری نظامی بود.

تام گاروی و هلن جان در حال کار با شیکی
رایانههای سمت راست، ویدئو و اطلاعات مربوط به حسگر را که توسط ربات ارسال شده بود، پردازش میکردند؛ سپس دستورهای حرکتی را به شیکی باز میفرستادند.
چرا نامش را شیکی گذاشتند؟
چارلز روزن، رئیس گروه هوش مصنوعی موسسۀ تحقیقات استنفورد، میگوید: «یک ماه دنبال نامی خوب برایش بودیم، از نامهای یونانی گرفته تا چیزهای دیگر، یک روز یکی از ما گفت: «هی! این دستگاه مثل چی میلرزه و وول میخوره! بیایید اسمش رو Shakey (لرزان) بذاریم».

چارلز روزن در کنار شیکی
روزن تیم ساخت شیکی را از سال 1966 تا 1972 رهبری کرد. او و سه همکار دیگر مؤسسهٔ تحقیقاتی استنفورد نیز به عنوان مالکان تاکستانهای سیلیکون وَلِی همکاری کردند.
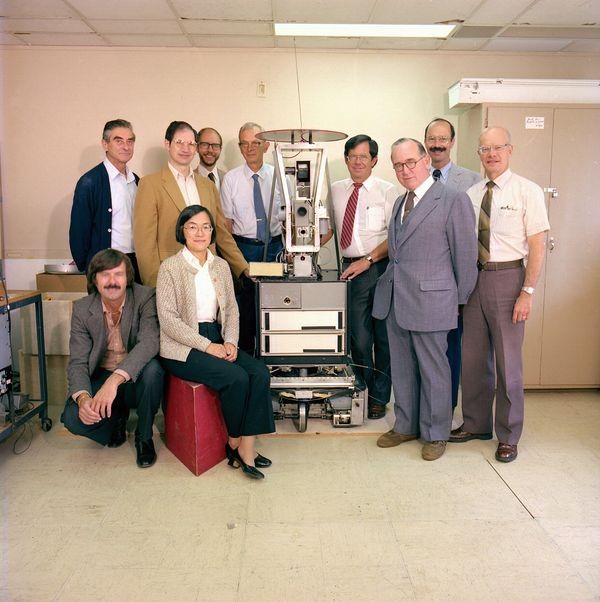
تیم شیکی
بیشتر اعضای تیم شیکی آخرینبار درست قبل از اهدای ربات به موزهٔ رایانه در بوستون در سال 1983 دوباره دور هم جمع شدند. عقب (از چپ به راست): چارلز روزن، برترام رافائل، دیک دودا، میلت آدامز، جرالد گلیسون، پیتر هارت، جیم بائر جلو (از چپ به راست): ریچارد فیکس، هلن (چان) ولف، تد برین