

استفاده کارآمد از رباتها
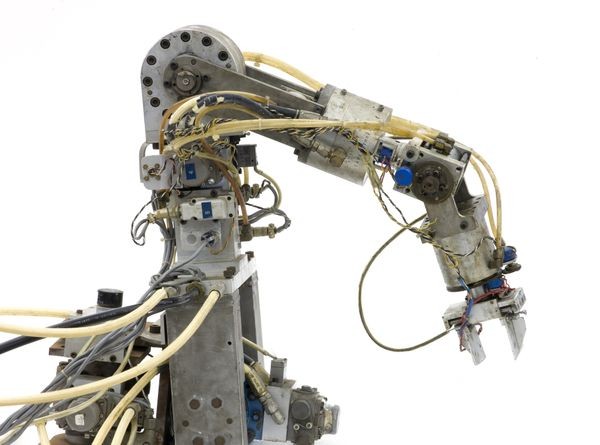
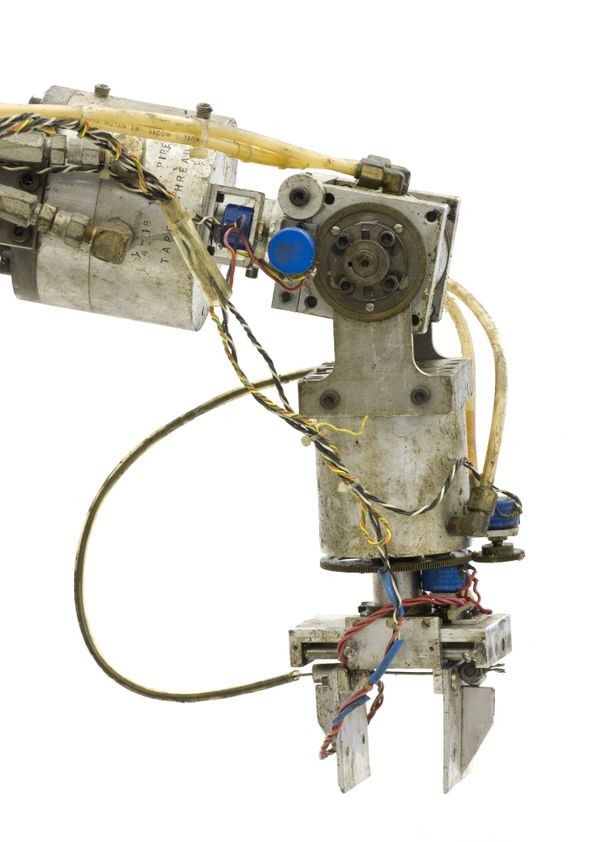
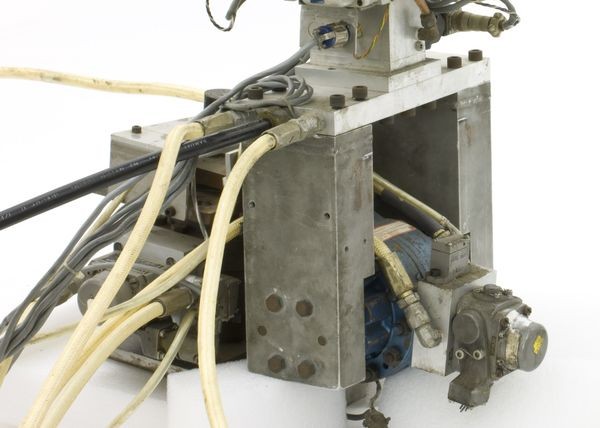
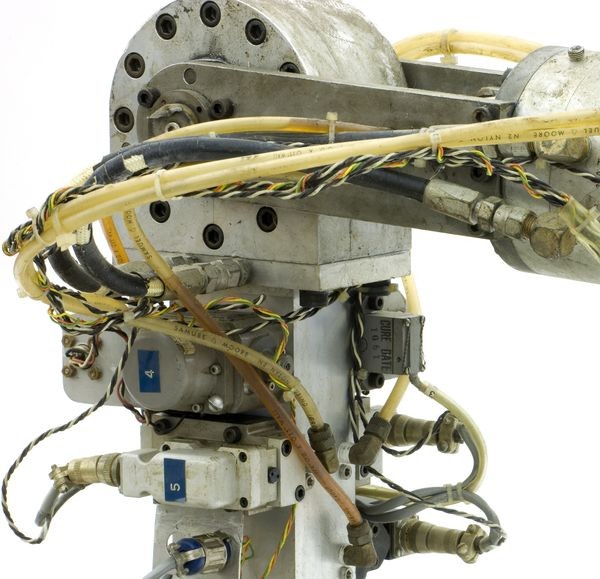
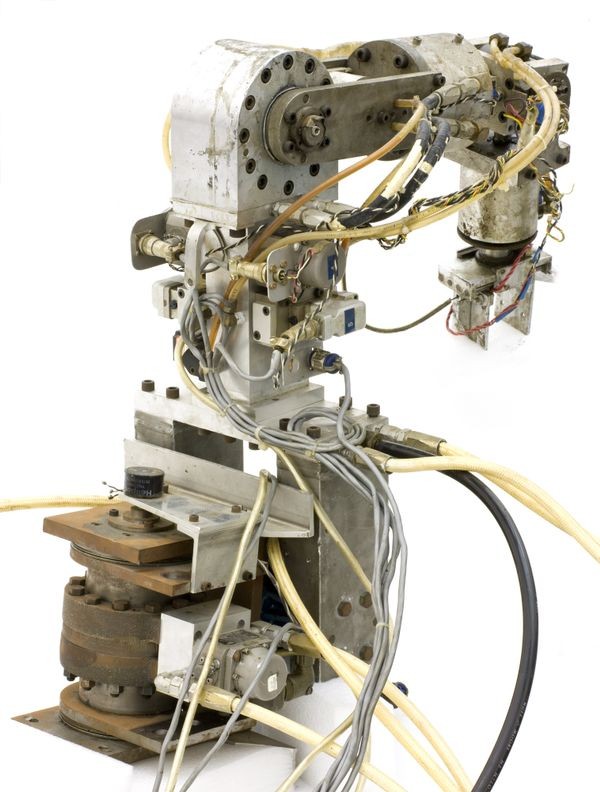
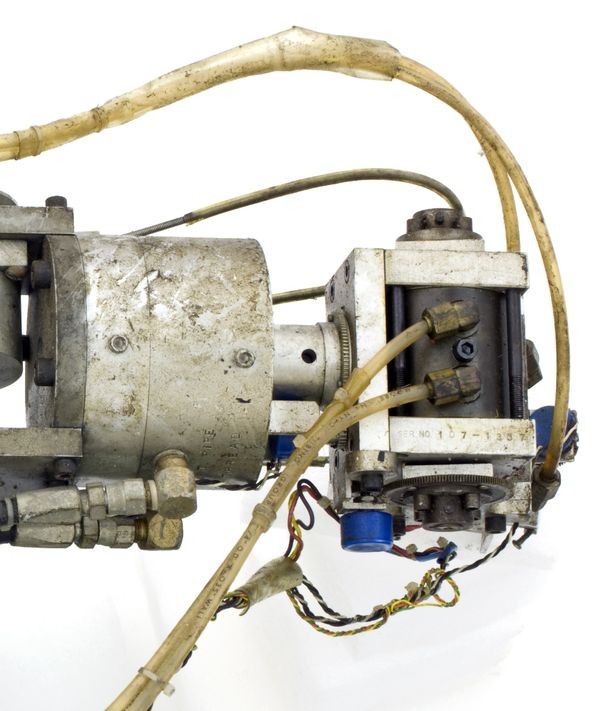
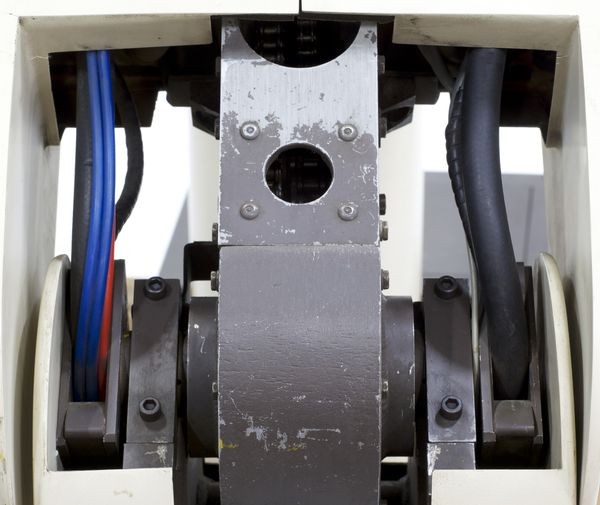
بازوی هیدرولیک استنفورد
بازوی هیدرولیک استنفورد محصول پروژهٔ هوش مصنوعی در دانشگاه استنفورد بین سال های 1966-1968 است. این ربات توسط ویکتور شاینمن و دیگران برای این ساخته شد که آزمایش شود آیا یک بازوی ربات میتواند با رایانهٔ کنترلکنندهٔ آن هماهنگ باشد یا خیر.
استفاده کارآمد از رباتها
در کارخانهها، رباتها نباید شبیه انسان به نظر برسند، بلکه فقط باید درست کار کنند. رباتها بهعنوان «حرکتدهندۀ اشیا با قابلیت برنامهریزی چندمنظوره» میتوانند جوش دهند، رنگآمیزی کنند، قطعات را مونتاژ کنند، کالاهای نهایی را بستهبندی کنند و برای اینکه ببینند محصول نهایی به درستی کار میکند، آن را آزمایش کنند. رباتهای صنعتیِ کنترلشده توسط رایانه، کمتر از یک دهه پس از اولین رایانهها ظاهر شدند. جرج دیول، شرکت یونیمیشن را در سال 1956 تأسیس کرد و بازوهای مکانیکی را با استفاده از محرکهای هیدرولیکی ساخت که در نهایت دقت آنها 0.0001 بود. یونیمیشن مجوز فناوری خود را به شرکت کاوازاکی ژاپن داد. شرکتهای امریکایی در دههٔ 1970 وارد این عرصه شدند، اما تعداد کمی از آنها در این عرصه باقی ماندند. امروزه بیشتر رباتهای صنعتی در ژاپن ساخته میشوند.
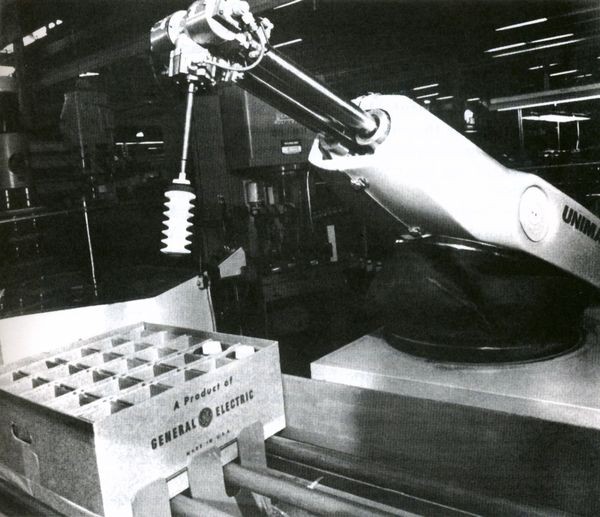
یونیمیت در شرکت جنرال الکتریک
جنرال موتورز در سال 1961 از یونیمیت 1 بهمنظور ریختهگری تحت فشار و جوشدادن قطعات روی بدنهٔ خودرو استفاده کرد. ربات این کارها را با موفقیت انجام داد و همین امر شرکت را تشویق به استفاده از ربات برای کارهای دیگر کرد.
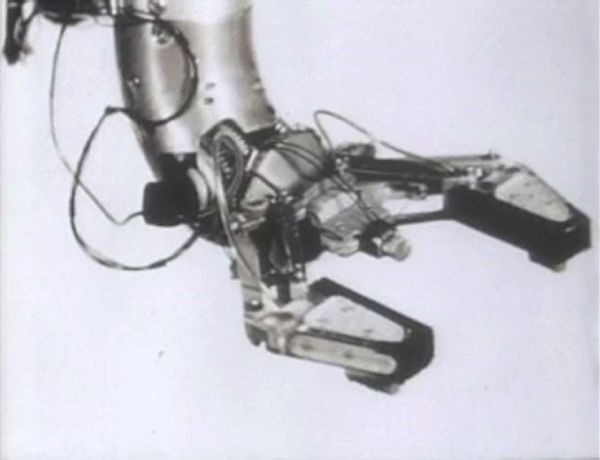
دست مکانیکی MH-1
هاینریش ارنست این دست مکانیکی را برای پایاننامهٔ دکترای خود در امآیتی زیر نظر کلود شانون طراحی کرد. این ربات توسط TX-0 هدایت میشد که یک رایانهٔ ترانزیستوری اولیه بود.


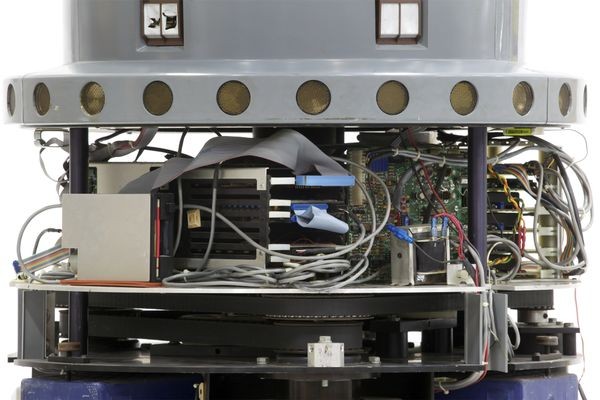
ربات iRiM50
این بازوی رباتیک از حسگرها و دوربینها برای انجام کارهای صنعتی تکراری و پیچیده استفاده میکرد. اما شرکت فروش را کاهش داد و دوباره بر روی سیستمهای بازرسی بصری مبتنی بر هوش مصنوعی تمرکز کرد. شرکت روبومیشین که زمانی آیندهٔ درخشانی برایش تصور میشد، در سال 1990 تعطیل شد.


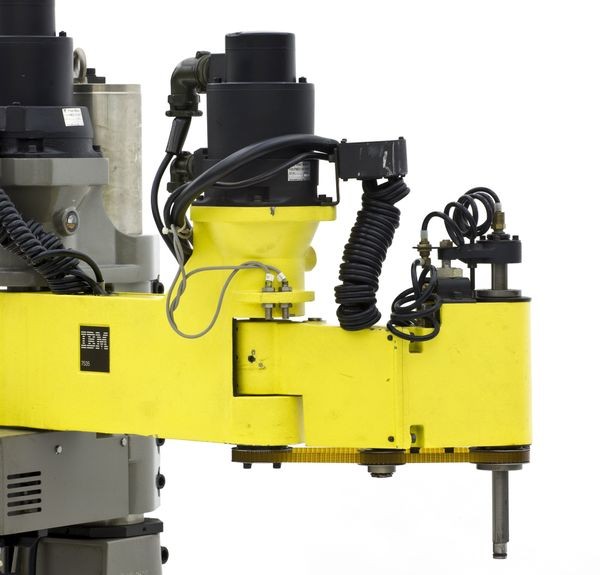
سیستم ساخت و تولید IBM 7535
IBM 7535 بر اساس یک ربات ژاپنی ساخته شد و توسط رایانهٔ شخصی آیبیام کنترل میشد و با زبان ایامال برنامهریزی شد. این ربات میتوانست با اشیای در حال تولید که حداکثر 13 پوند وزن داشتند، کار کند.






ربات سنتری
شرکت دنینگ واقع در بوستون ربات سِنتری را به عنوان نگهبان امنیتی طراحی کرد. این ربات میتوانست تا 14 ساعت با سرعت سه مایل در ساعت به گشتزنی بپردازد و راجع به هر چیز غیرمعمول در شعاع 150 فوتی هشدار رادیویی صادر کند. این محصول و این کمپانی نتوانستند موفق باشند.
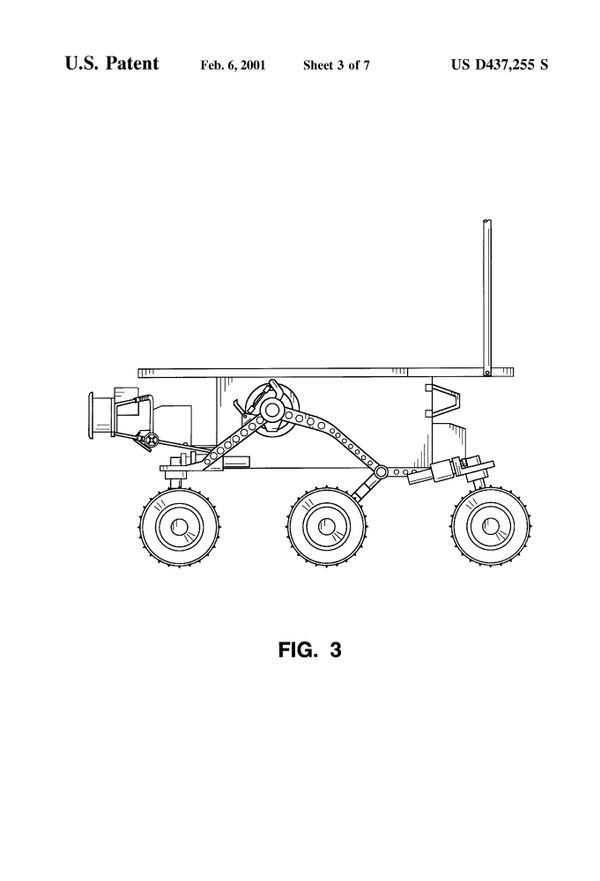
طرح ثبت اختراع مریخنورد
این گواهی ثبت اختراع متعلق به دانشگاه کلتک، مربوط به مریخنوردهای فرصت (Opportunity) و روح (Spirit) است. هر دو ربات در سال 2004 به سطح مریخ فرود آمدند و 20 برابر بیشتر از عمر برنامهریزیشدۀٔ 90 روزۀ خود به فعالیت ادامه دادند.