

پژوهشهای رباتی




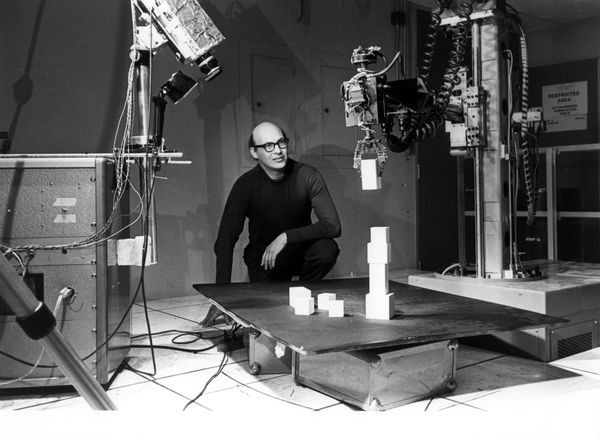
گاری استنفورد
ربات گاری استنفورد در ابتدا برای پژوهش در مورد هدایت وسایل نقلیه روی ماه از روی زمین ساخته شد. این ربات در سال 1966 بازبینی و بازطراحی شد تا ایدهٔ وسیلهٔ نقلیهٔ خودران را به آزمون بگذارد. نتیجهٔ تکامل تدریجی ایدههای اولیهای که بر روی استنفورد کارت مطالعه شدند، امروزه در اتومبیلهای خودران دیده میشود.
پژوهشهای رباتی
دانشگاهها قلب تپندهٔ مطالعات رباتیک بودند. ساخت و طراحی بیشتر این رباتها از نقطهٔ صفر و بدون هیچ سابقهٔ مطالعاتی انجام شد، و هدف آنها پژوهش بر روی روشهایی برای حرکت، برنامهریزی و درک محیطی از طریق حسگرها بود. شرکت دنینگ در 1983 وارد بازار فروش محصولات رباتیک شد و پس از آن شرکتهای دیگر رباتهای تحقیقاتی خودران خود را به فروش رساندند. شرکت دنینگ در 1997 ورشکسته شد، اما شرکتهای دیگر با محصولات پیچیدهتر جایش را گرفتند.
ماروین مینسکی در کنار «بازوی مینسکی»
مینسکی، از بنیانگذاران آزمایشگاه هوش مصنوعی امآیتی، پیشگام کار بر روی شبکههای عصبی، بازنمایی دانش، زبانشناسی و رباتیک بود. این بازو یکی از سری بازوهایی بود که در امآیتی ساخته شدند.
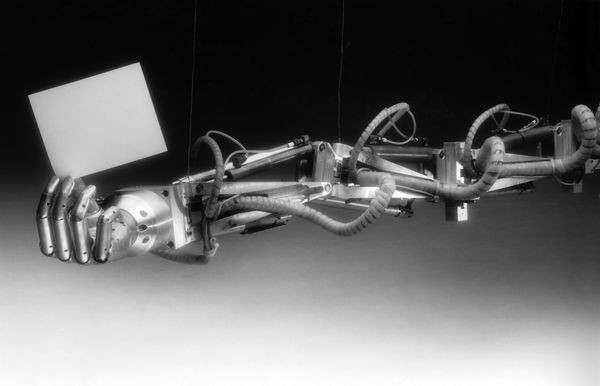
بازوی تنتکل مینسکی
این ربات 12 مفصل داشت و میتوانست از طریق نیروی حاصل از جریانهای هیدرولیکی درون بازو، مانند اختاپوس حرکت کند و موانع پیش رویش را دور بزند. یک دستگاه رایانهٔ DEC PDP-6 نیز آن را کنترل میکرد.

شیگئو هیروسه در کنار رباتهایش
پژوهشهای پروفسور هیروسه بر رباتهایی که مانند جانوران حرکت میکردند، متمرکز بود: راه رفتن، خزیدن و شناکردن. او همچنین بر روی رباتهایی کار میکرد که برای منفجرکردن مینهای فعال استفاده میشدند.







ربات اُبلیکس
این ربات مارمانند با چرخاندن مفاصل زاویهدار خود حرکت میکرد، ابلیکس که توسط پروفسور شیگئو هیروسه هم به عنوان یک بازو و هم به عنوان یک جستجوگر سیار متصل (tethered rover)طراحی شده بود، بهصورت تجاری برای کاربردهای صنعتی به نام بازوی مُگورا به بازار عرضه شد.

هانس مراوک در دانشگاه کارنگی ملون
مراوک برای پایاننامهٔ دکتریاش که دربارهٔ بینایی ماشین و رباتیک بود، از ربات گاری استنفورد استفاده کرد. او همچنین در مورد اینکه بشر ناگزیر است به سوی ساخت رباتهای فراهوشمند حرکت کند، مطالبی نوشت.


سنتیباتها
پروژه سِنتیباتها که توسط آژانس پروژههای تحقیقاتی پیشرفته دفاعی (دارپا) تأمین مالی میشد، به دنبال اثبات این بود که تا 100 ربات می توانند در محیط شهری برای درک محیط و برداشت اطلاعات نظارتی با هم همکاری کنند.
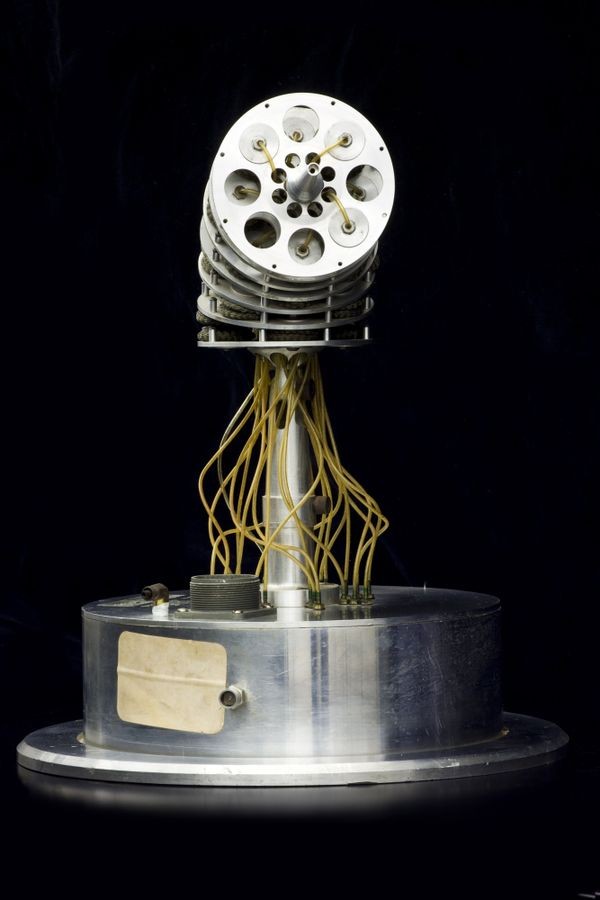


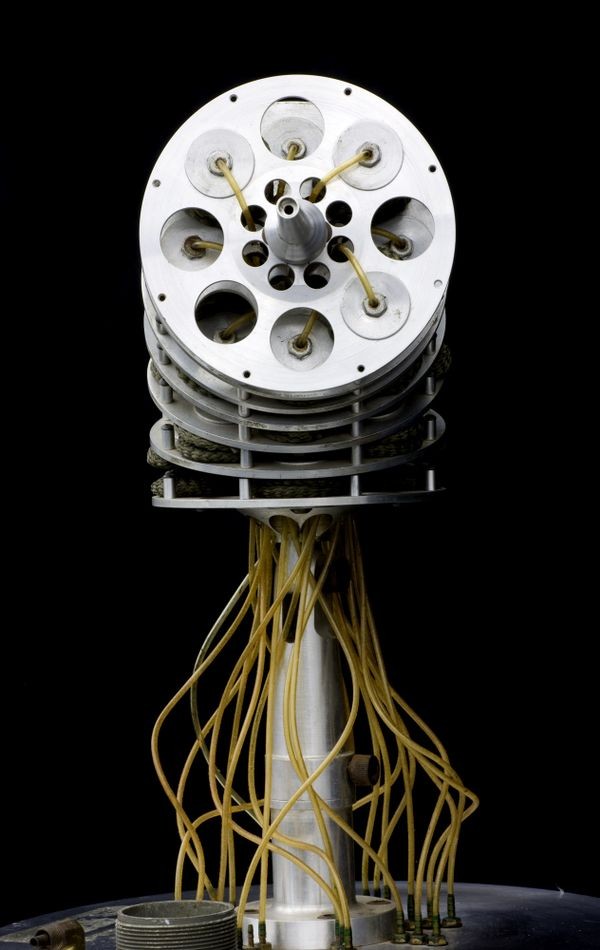

اُرم
ربات اُرم (در زبان نروژی به معنی مار) یک بازوی غیر معمول رباتیک بود که با نیروی هوای فشرده کار میکرد. حرکات ارم از طریق بادشدن یک یا چند بادکنک پلاستیکی ایجاد میشد. ارم در مجموع 28 بادکنک داشت که بین هفت صفحهٔ فلزی ساندویچ شده بودند. این نوع طراحی خیلی زود منسوخ شد؛ زیرا حرکات ربات با این فناوری قابلیت تکرار سریع را نداشتند.


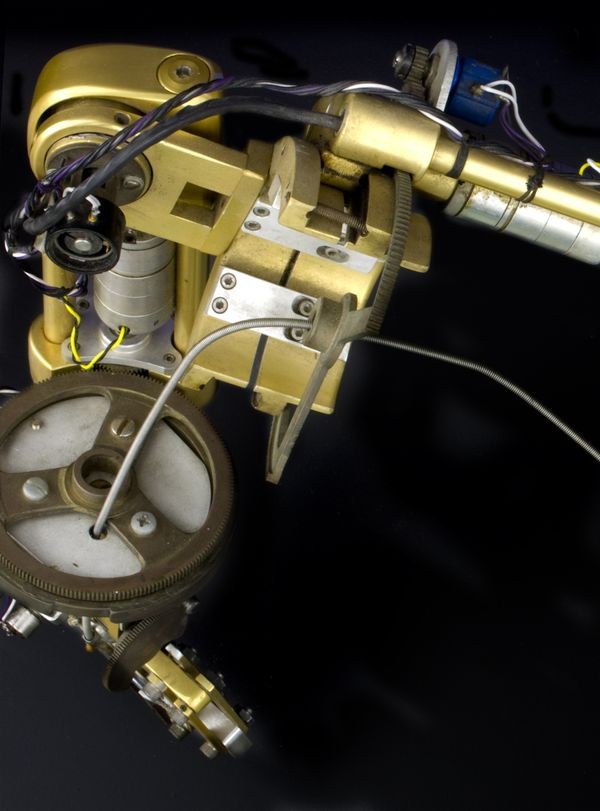
بازوی رانچو
مفاصل ششگانهٔ بازوی رانچو به آن انعطافپذیریای مشابه بازوی انسان میداد. این بازو در اصل بهمنظور کمک به افراد معلول ساخته شده بود. بازوی رانچو یکی از نخستین رباتهایی بود که از طریق رایانه هدایت میشد. پروژه در سال 1963 به دانشگاه استنفورد منتقل شد.


سگ رباتی آیبو
ربات 2 هزار دلاری آیبو (AIBO; Artificial Intelligence RoBOt – به معنای «ربات هوش منصوعی») یک سگ خانگی رباتیک بود و به گونهای طراحی شده بود که از طریق تعاملی که با محیط اطراف، صاحبش و سایر آیبوها برقرار میکرد، قادر به «آموختن» باشد. این ربات به بیش از 100 دستور صوتی مختلف واکنش نشان میداد و میتوانست با استفاده از تغییر در زیر و بم اصواتی که ادا میکرد، ارتباط برقرار کند.